

Hand function rehabilitation robot with rigid-flexible coupling structure for stroke patients
A rehabilitation robot, rigid-flexible coupling technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of poor ergonomics of rigid exoskeleton hand rehabilitation robot, low physiological and psychological acceptance of patients, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
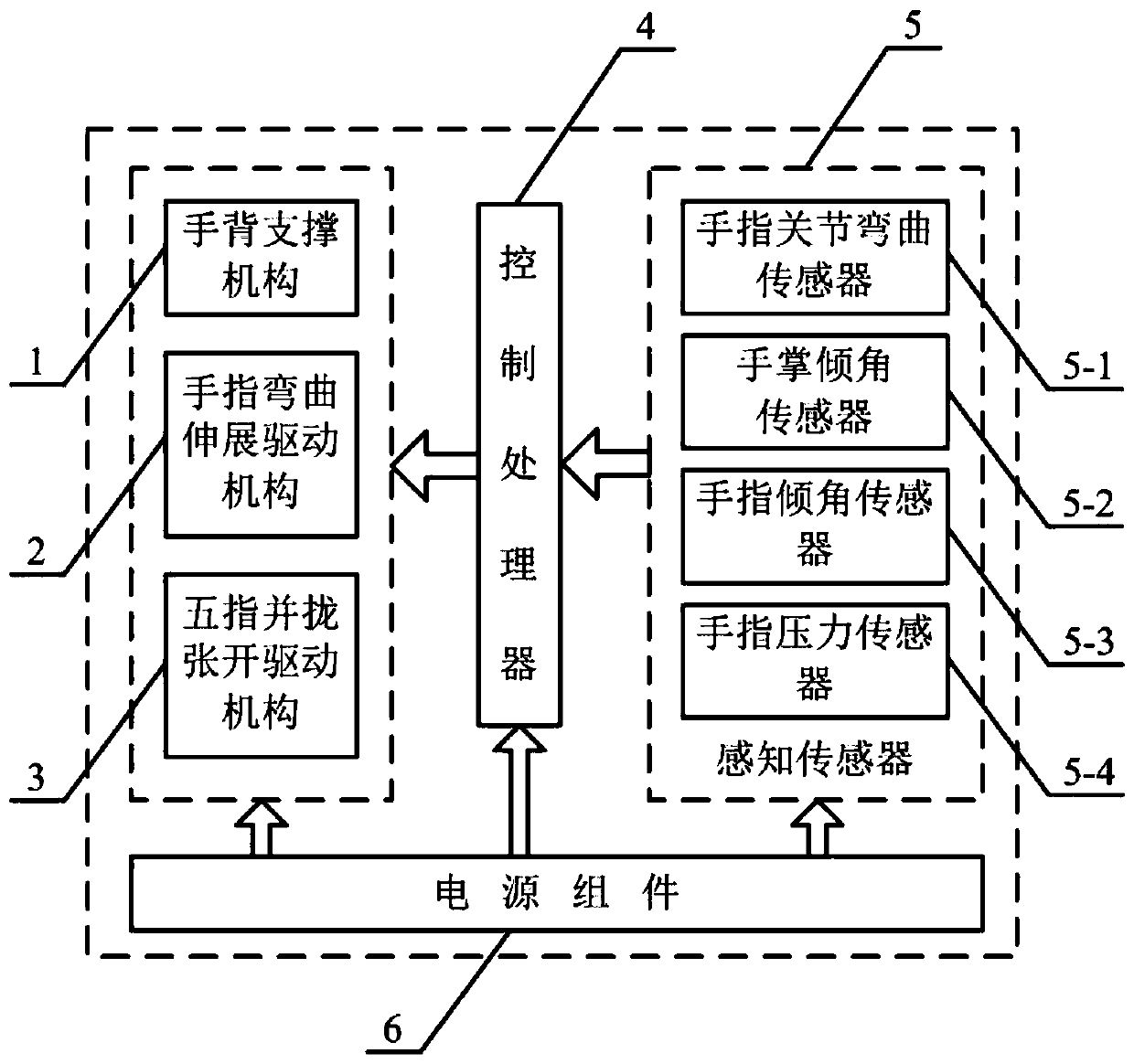
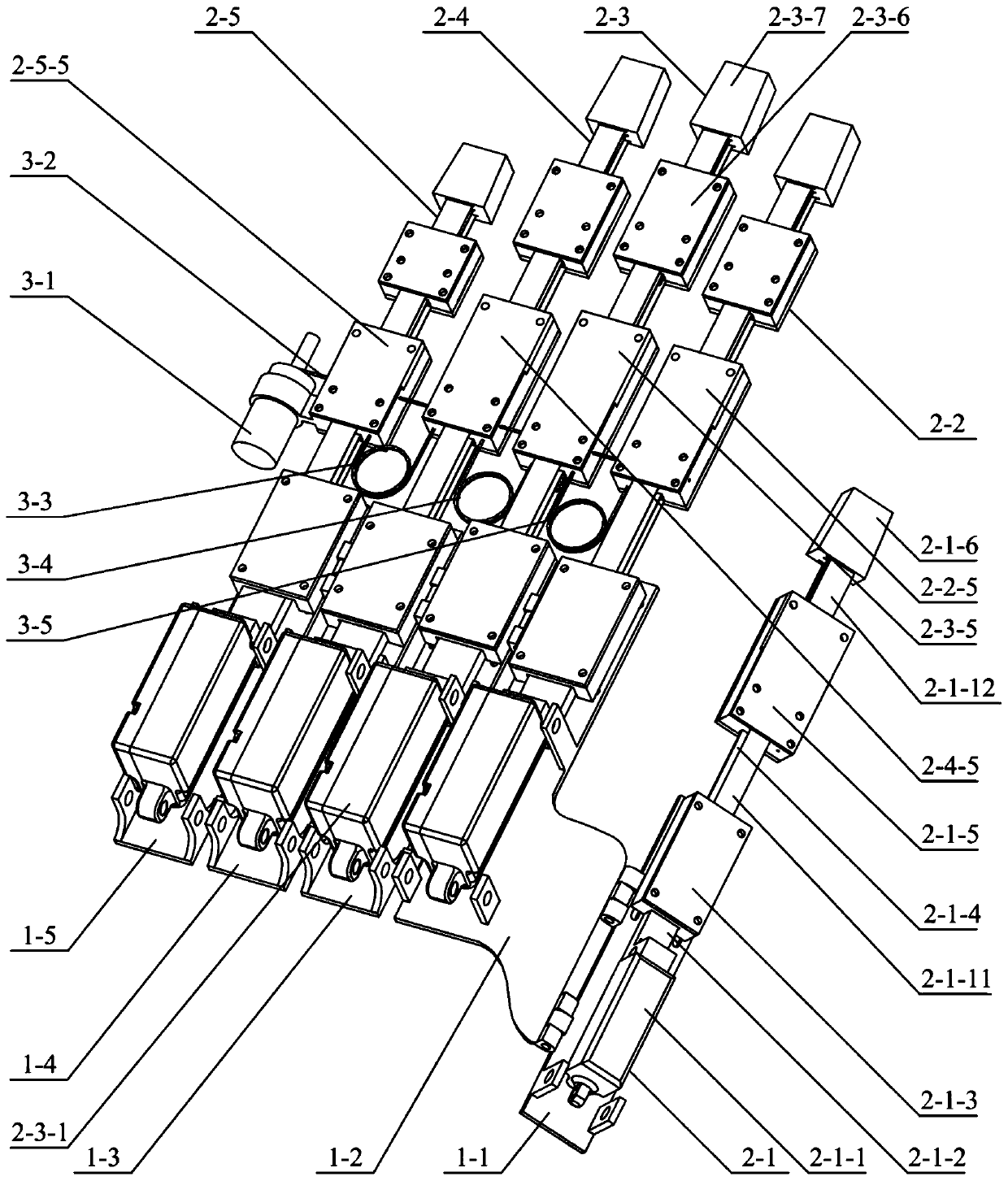
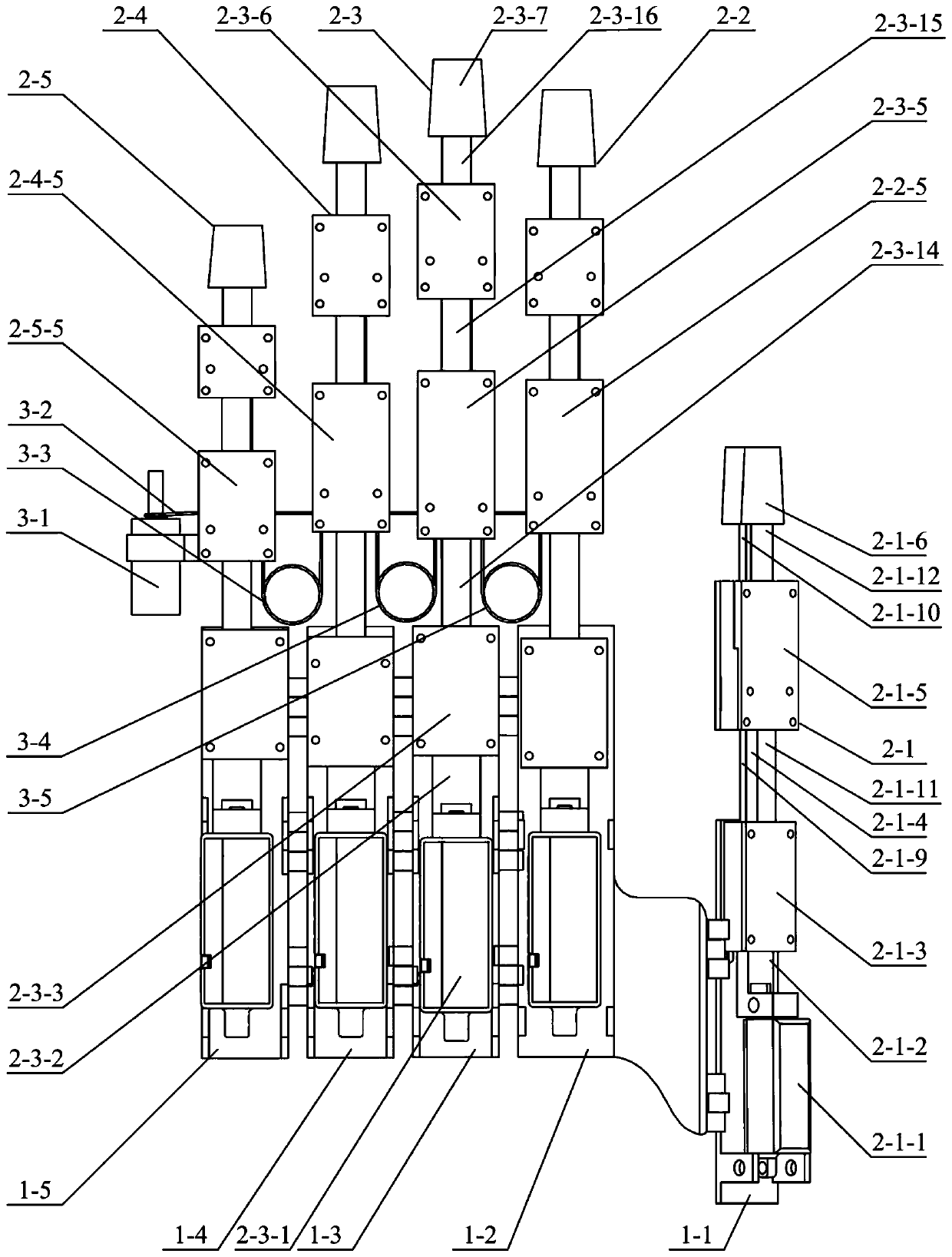
[0064] Refer to attached figure 1 , attached figure 2 , attached image 3 , attached Figure 4 , the hand function rehabilitation robot for stroke patients with rigid-flexible structure coupling of the present invention includes a back support mechanism 1, a finger bending and stretching drive mechanism 2, a five-finger close-up and spread drive mechanism 3, a control processor 4, a sensor sensor 5 and a power supply assembly 6 composition.
[0065] The back of the hand support mechanism 1 is provided with a finger bending and stretching drive mechanism 2, and the finger bending and stretching drive mechanism 2 is connected with the five fingers close together and spread open drive mechanism 3; The opening driving mechanism 3 is all connected with the control processor 4; the sensory sensor 5 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More