

Three-freedom-degree weeding robot
A degree of freedom, robotic technology, applied in the direction of cutters, harvesters, chassis of agricultural machinery, etc., can solve problems such as inability to move flexibly, single cutting position, inability to adapt to the field environment, etc., to achieve flexible cutting methods and avoid idling. , the stable effect of the linkage mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention is described in further detail below in conjunction with accompanying drawing:
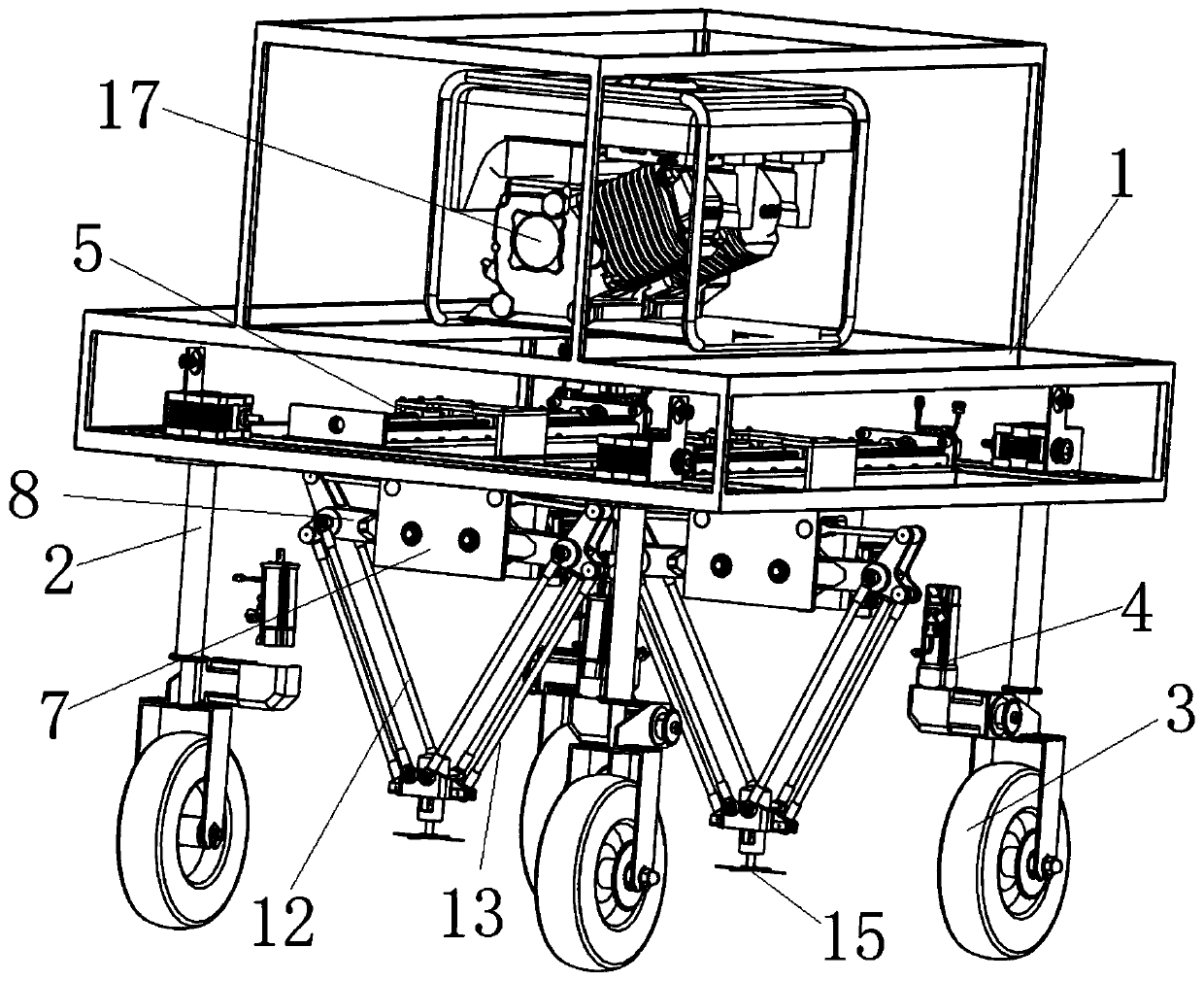
[0028] Such as figure 1 Shown is the three-degree-of-freedom movable weeding robot of the present invention, including a vehicle frame 1 , a transmission device and wheels 3 .
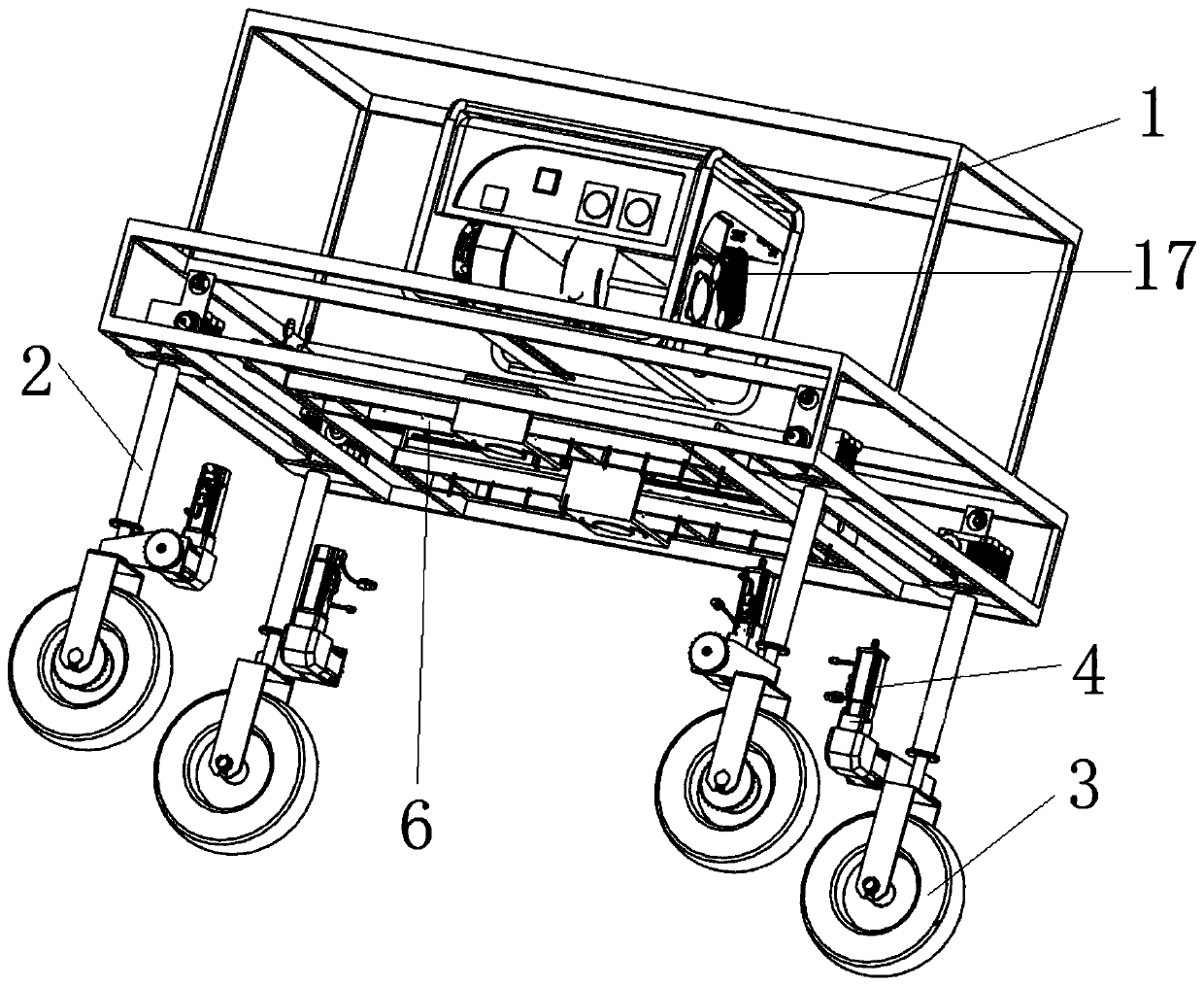
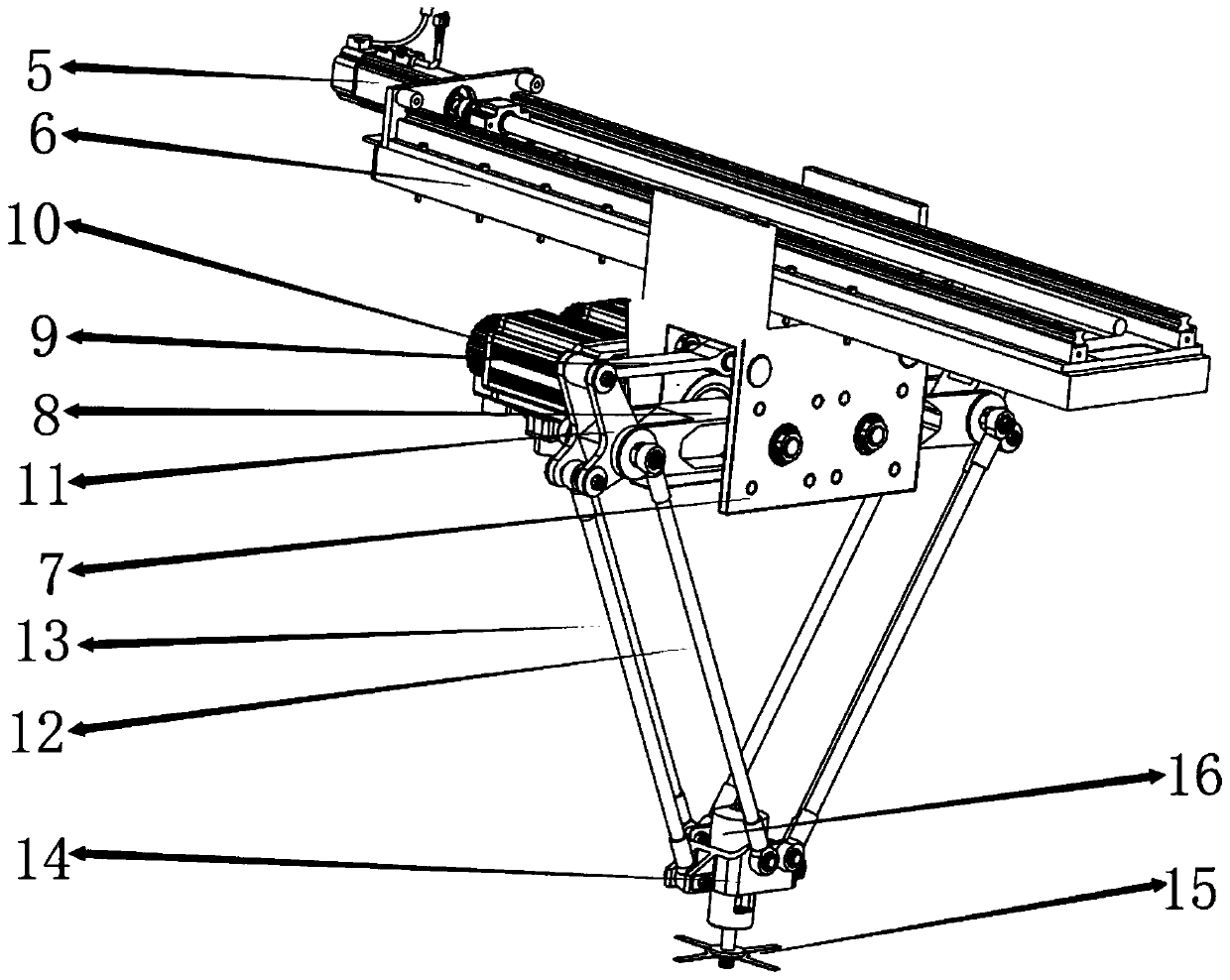
[0029] Vehicle frame 1 comprises upper half and lower half, and upper half is used to place generator 17, and generator 17 is used to supply power to linear motion device motor 5, active arm motor 10, wheel motor 4 and weeding rotary knife motor 16; Such as figure 2 As shown, the lower half of the vehicle frame 1 is a square frame for placing the linear motion mechanism, and the two ends of the linear motion mechanism are placed on the frame of the lower half.
[0030] Such as figure 2 As shown, the bottom four corners of the lower part of the vehicle frame 1 are connected with support rods 2, the bottom of the support rod 2 is connected with wheels 3, the wheels 3 are connected with the w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More