

A labeling method for short-wave direction-finding datasets based on least-squares positioning
A technology of least squares and data sets, which is applied in the field of labeling of shortwave direction finding data sets based on least squares positioning, can solve problems such as the lack of short wave direction finding data sets, solve ill-conditioned optimization problems, speed up convergence, and improve The effect of convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
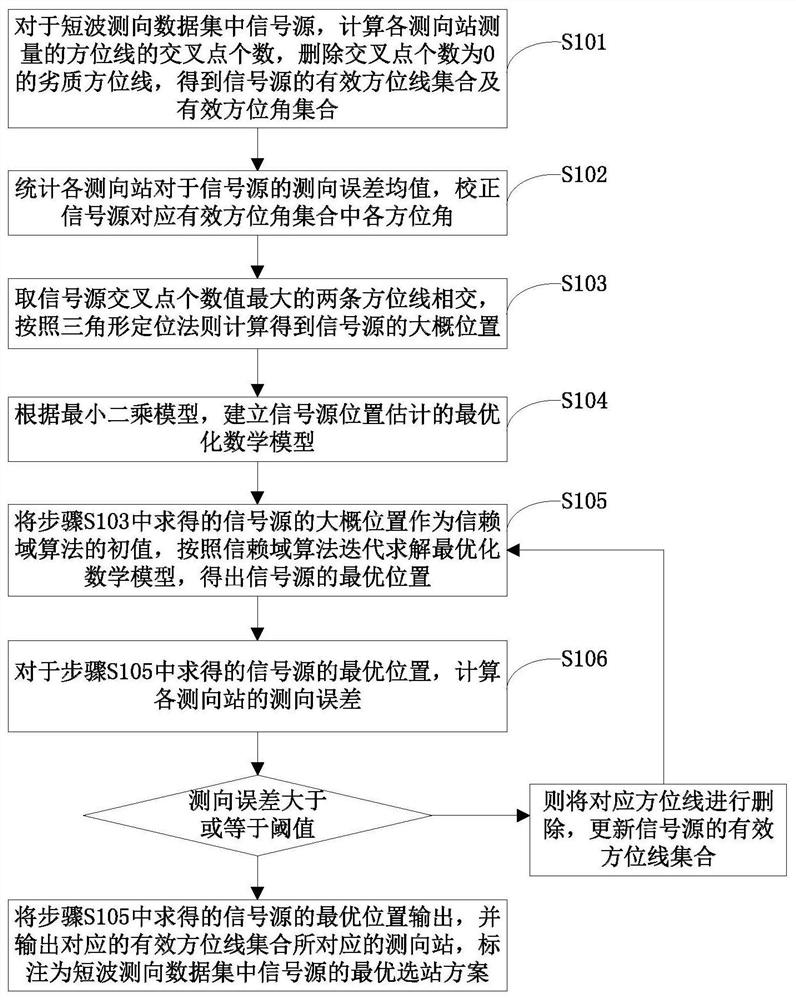
[0049] Such as figure 1 As shown, a method for labeling short-wave direction-finding datasets based on least squares positioning, including:
[0050] Step S101: For the signal source in the short-wave direction-finding data set, calculate the number of intersections of the bearing lines measured by each direction-finding station, delete the inferior bearing lines whose number of intersections is 0, and obtain the effective bearing line set and effective bearing of the signal source corner collection;
[0051] Step S102: Calculate the mean value of the direction-finding error of each direction-finding station for the signal source, and correct each azimuth in the effective azimuth set corresponding to the signal source;
[0052] Step S103: Take the intersection of the two azimuth lines with the largest number of intersection points of the signal source, and calculate the approximate position of the signal source according to the triangle positioning rule;
[0053] Step S104: ...
Embodiment 2
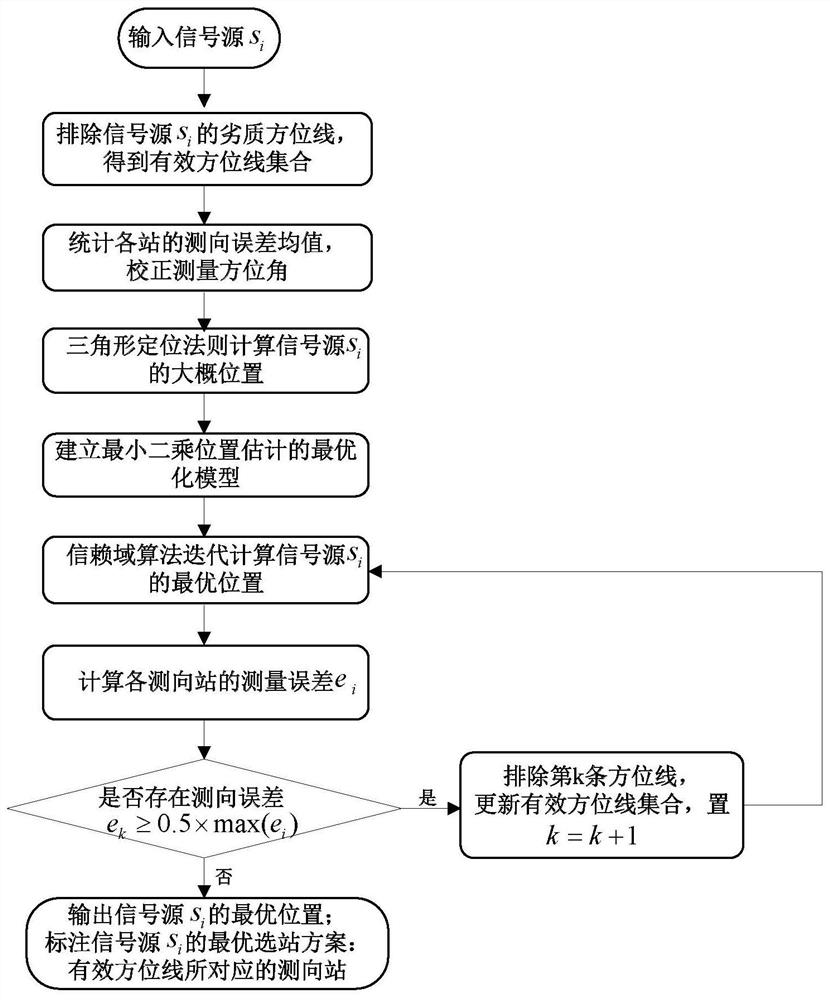
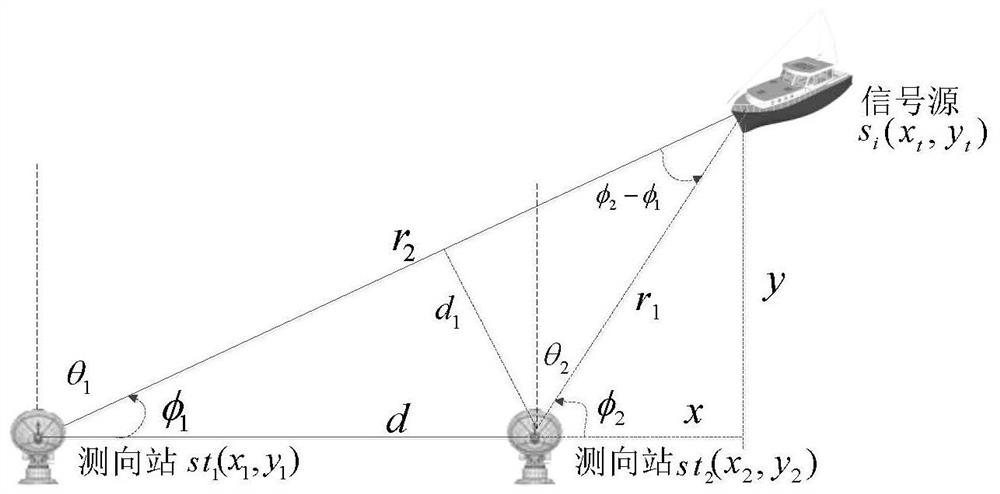
[0082] Such as figure 2 As shown in , another method for labeling shortwave direction-finding datasets based on least squares positioning is aimed at having n direction-finding stations st j ,j∈[1,n], the shortwave direction finding data set S of N samples in the "total station direction finding" mode = {s 1 ,s 2 ...s i ...s N},include:
[0083] Step S201: For the target signal source s i ∈S,i∈[1,N], the azimuth line (orientation line) measured by each direction-finding station is: l 1 , l 2 ... l j ... l n , the azimuth is the angle θ between the bearing line and the true north direction 1 ,θ 2 ... θ j ... θ n ;Calculate bearing line l j The number of intersections M j , excluding the number of intersections M j = 0 inferior bearing line, get the signal source s i The set of effective bearing lines L i ={l 1 , l 2 ,...,l m}, the set of effective azimuth angles θ i ={θ 1 ,θ 2 ,...,θ m}, m≤n, and set c=0 at the same time, c is the number of times to sol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More