

Exoskeleton robot and controller system thereof
An exoskeleton robot and control system technology, applied in the direction of program control manipulator, manipulator, manufacturing tools, etc., can solve the problem that the battery can only be used for 40 minutes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0254] The technical solution of the present invention will be further described in detail below in conjunction with specific examples, but the protection scope of the present invention is not limited to the following description.
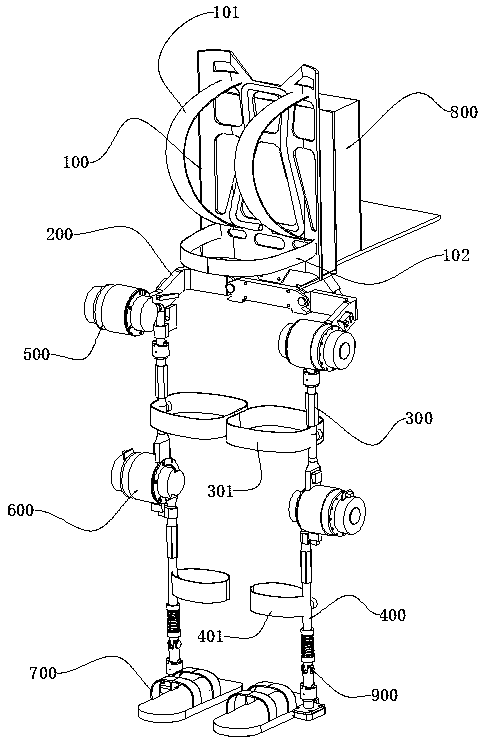
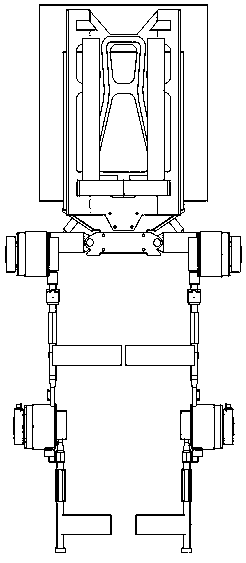
[0255] Such as figure 1 , 2 Shown, a kind of exoskeleton robot, this robot comprises back frame 100, waist ring 200, left / right thigh assembly 300, left / right calf assembly 400, left / right shoe portion 700;
[0256] The back frame 100 is connected with the waist ring 200 and located above it;
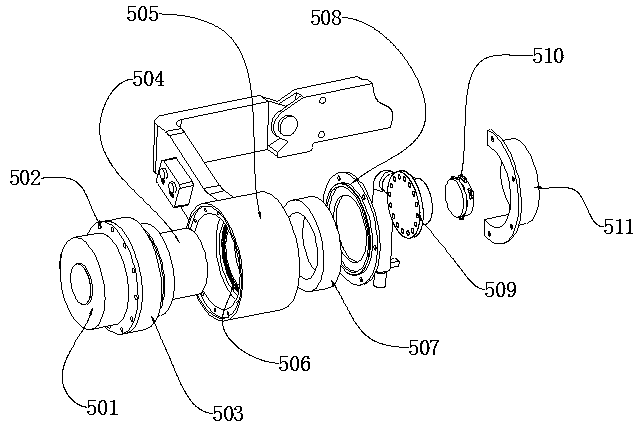
[0257] The left / right thigh assembly 300 is connected to the left and right sides of the waist ring 200 through a hip joint assembly 500;
[0258] The left / right thigh assembly 300 and the left / right calf assembly 400 are respectively connected by a knee joint assembly 600;
[0259] The left / right shoe 700 is connected to the left / right calf assembly 400 through an ankle joint assembly 900;
[0260] The hip joint assembly 500 provides three degrees of fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More