

omnidirectional wheeled robot
A robot and omnidirectional wheel technology, which is applied in motor vehicles, transportation and packaging, etc., can solve the problems of small size of robot legs, difficult platform posture adjustment, and no consideration of the robot's ability to overcome obstacles. Simple control and compact effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
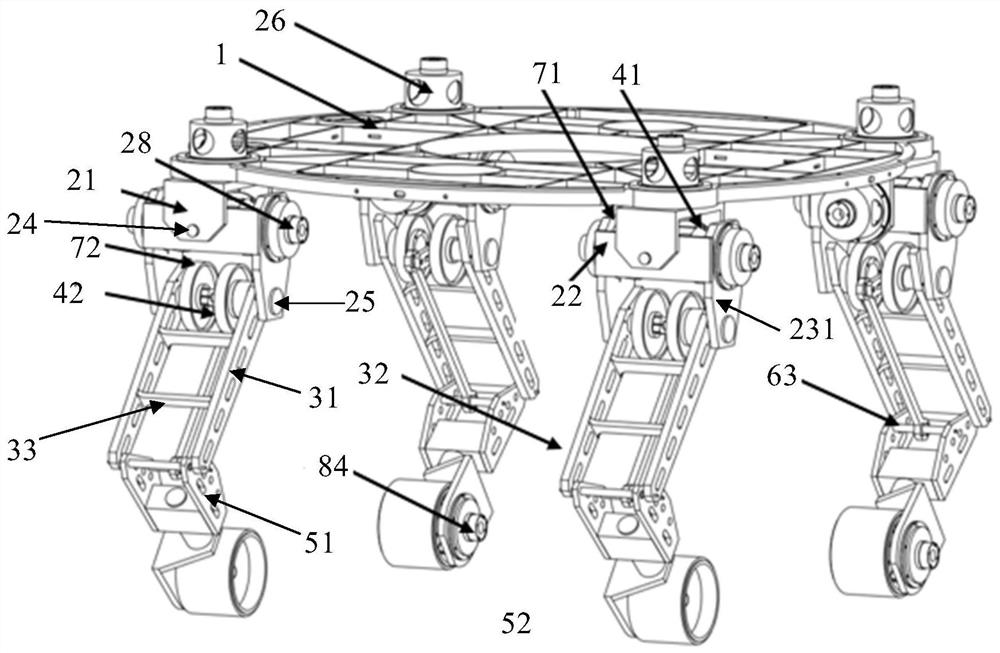
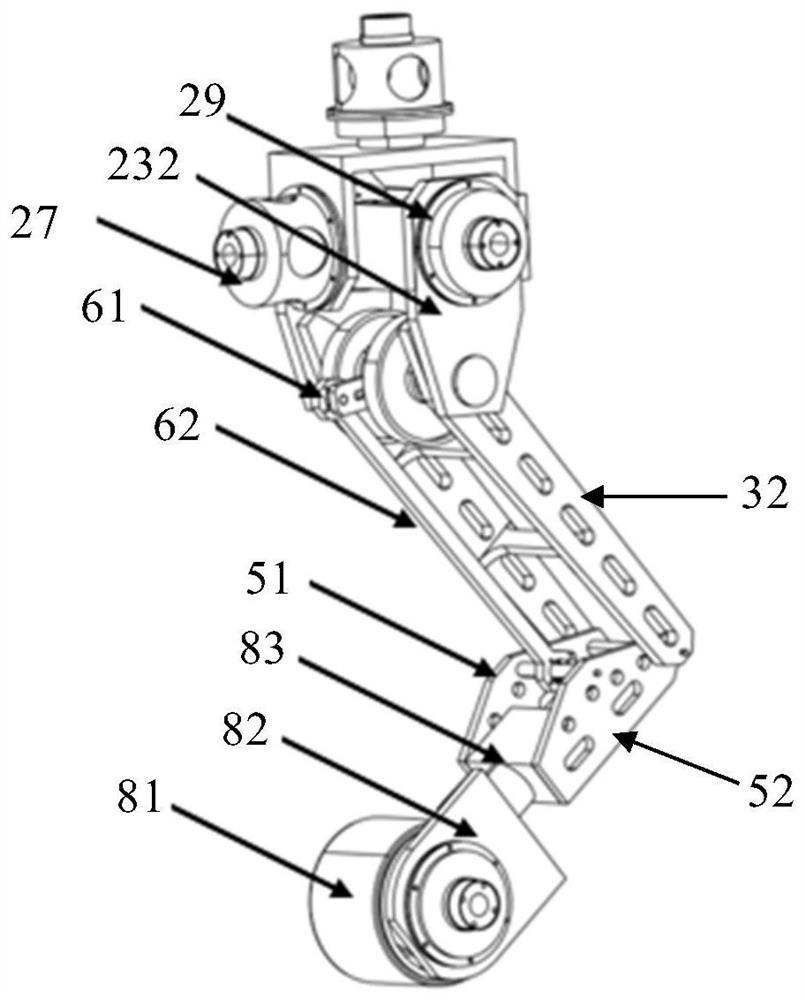
[0049]After extensive and in-depth research, the inventor first developed an omnidirectional wheel-footed robot with compact structure, simple control, high carrying capacity and high motion efficiency. The omnidirectional wheel-footed robot uses a parallelogram linkage mechanism to transmit the rotation of the knee joint, and integrates the drive motor into the upper part of the leg, which not only effectively reduces the moment of inertia of the leg, but also makes the leg mechanism flexible; and the robot's The structure of each leg is a symmetrical structure, and the robot itself also adopts a symmetrical structure and is isotropic. Wheels are arranged at the end of the legs of the robot, which can drive the robot forward or backward, and at the same time reduce the size of the legs, increase the flexibility of the legs, and enable the robot to flexibly adjust the position of the frame during the movement. Pose, through the rotation of the wheel drive motor, the wheels can...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More