

Multi-robot fiber placement track fixed angle design method
A multi-robot and design method technology, applied in geometric CAD and other directions, can solve the problems of strong CAD software dependence, limited application scope, and difficult development, and achieve easy algorithm improvement and version upgrade, wide application scope, and low development cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions provided by the present invention will be described in detail below in conjunction with specific examples. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
[0032] A method for designing a fixed angle of a multi-robot wire laying trajectory provided by the invention comprises the following steps:
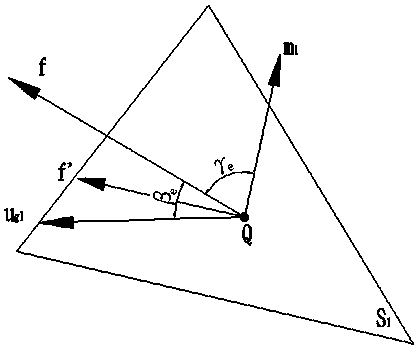
[0033] Step 1, firstly carry out grid processing on the surface, pre-grid and discretize the paved surface, and approximate it with a plane (called a grid surface); obtain the trajectory feature points on the approximation plane, and convert the surface problem into a plane Above. Perform trajectory planning on the meshed surface, replace the complex problem with a simpler problem and then solve it. If the grid division accuracy can be guaranteed, the trajectory planning algorithm can be applied to various complex shapes. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More