

Robot Parameter Identification and Contact Force Monitoring Method Based on Prior Dynamics Knowledge
A technology of dynamic parameters and robots, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as difficult to guarantee real-time performance and large amount of image information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Specific examples of the present invention are given below. The specific embodiments are only used to describe the present invention in detail, and do not limit the scope of protection required by the patent application.
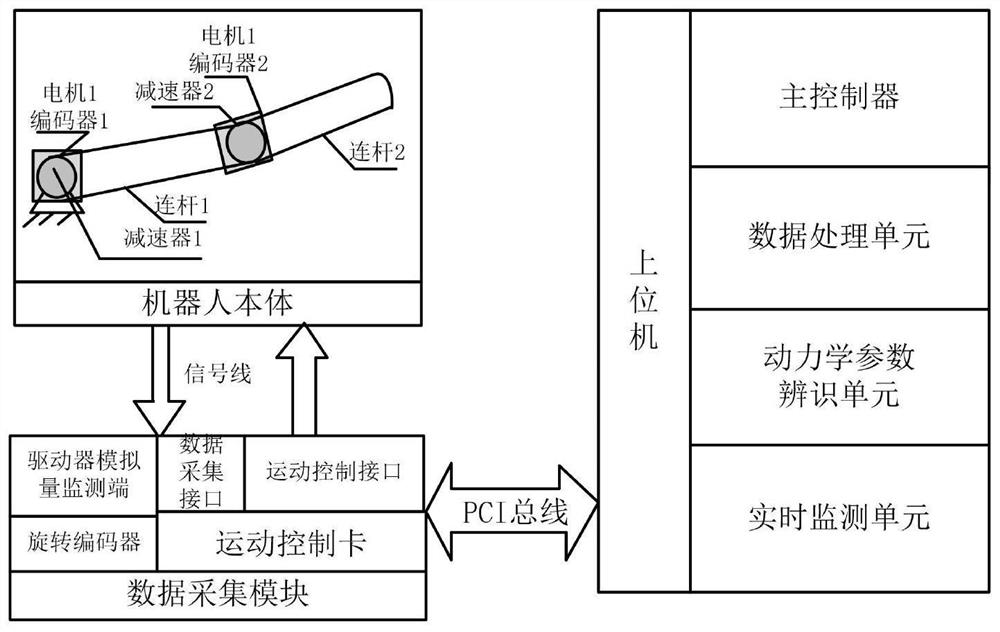
[0037] The invention is a robot parameter identification and contact force monitoring method based on priori dynamics knowledge. The method does not need a force sensor and a visual sensor, and obtains the orientation and magnitude of contact force according to the priori dynamics knowledge.
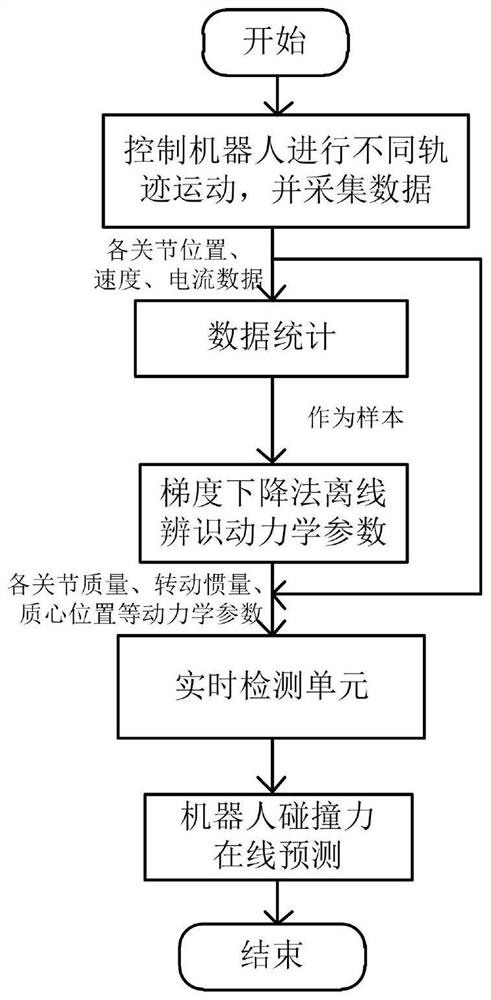
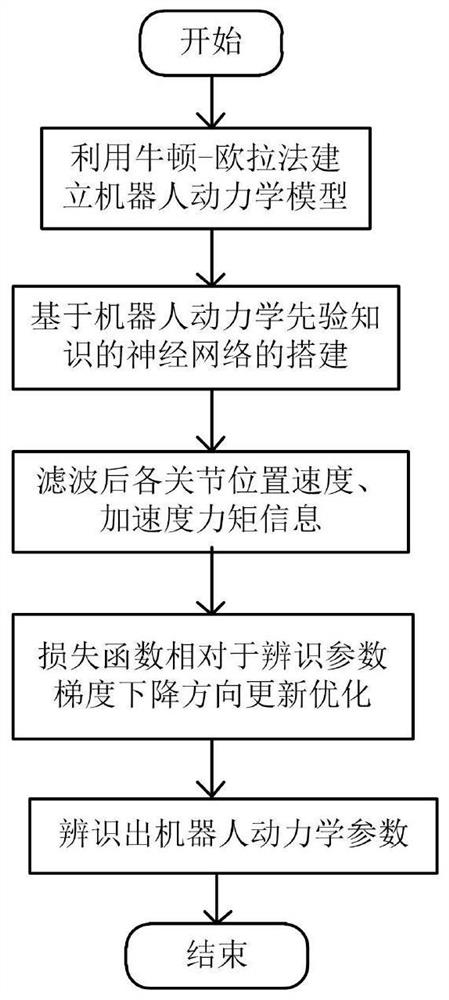
[0038] The present invention identifies the dynamic parameters of the robot through the gradient descent method, establishes an accurate dynamic model of the robot in free space, and then inputs the real-time information of the encoder angle and angular velocity after filtering and differential processing into the above-mentioned accurate dynamic model of the robot to obtain the condition At the same time, the current signal of the motor driver is converted into...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More