Multi-sensor fusion method based on DS-GNN algorithm
A multi-sensor fusion and sensor technology, which is applied in the direction of instruments, calculations, computer components, etc., can solve the problems that the advantages of sensor recognition technology cannot be effectively utilized, and the system robustness is not strong.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The specific embodiments of the present invention will be described in conjunction with the accompanying drawings, so that future researchers can better understand the present invention.
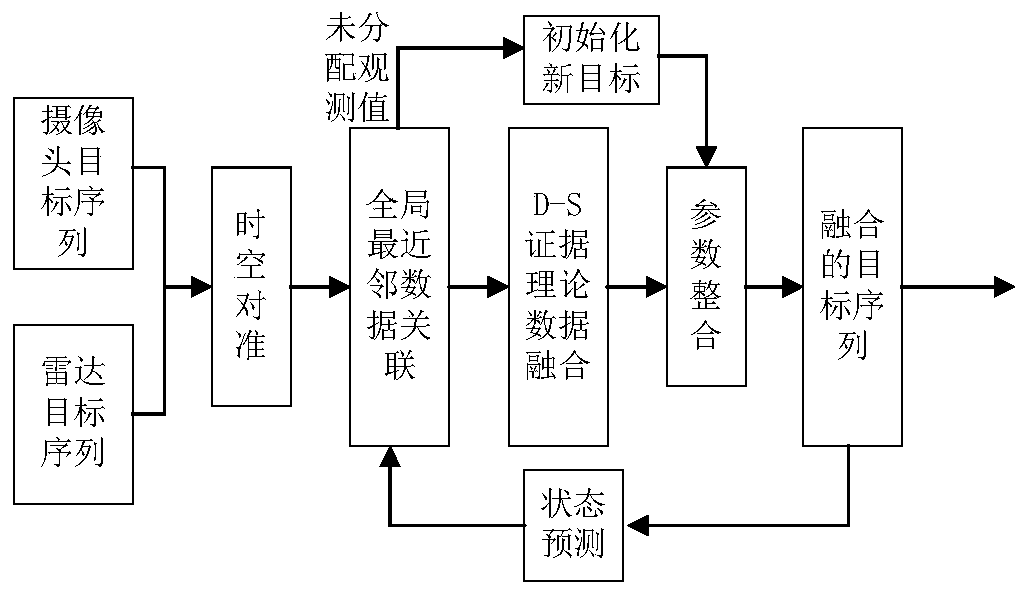
[0076] This paper invented a multi-sensor fusion method based on the DS-GNN algorithm (Dempster / Shafer evidence theory-global nearest neighbor), including the following main steps:
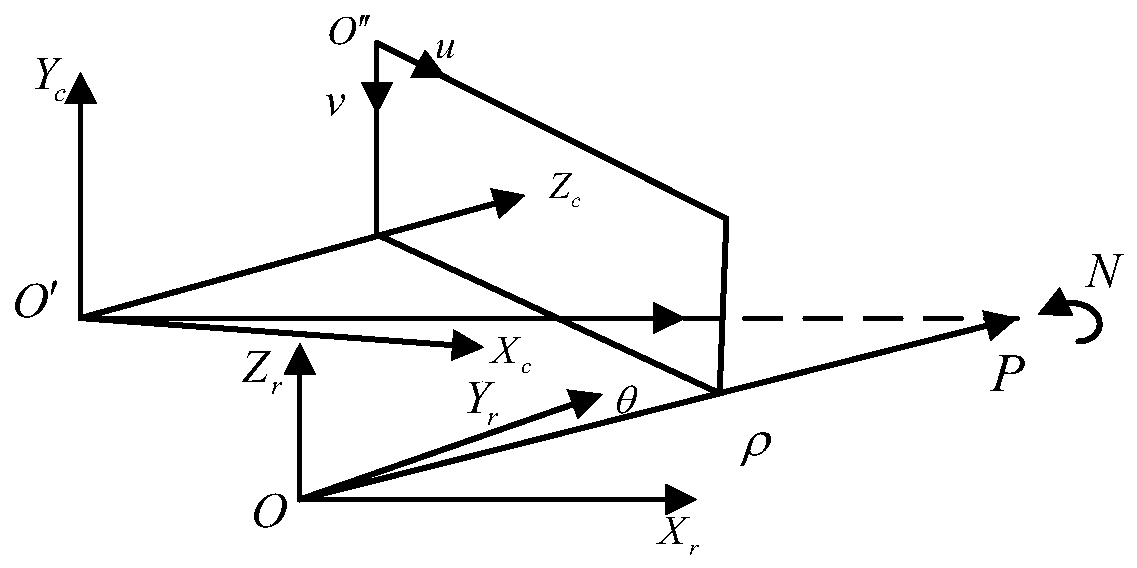
[0077] Step 1: Spatiotemporal Fusion of Camera and Radar
[0078] According to the range and azimuth information of millimeter-wave radar, different spatial transformation matrices are applied to realize the spatial fusion of vision and millimeter-wave radar. The method of multi-thread synchronization is used to solve the time fusion problem of camera and millimeter-wave radar.
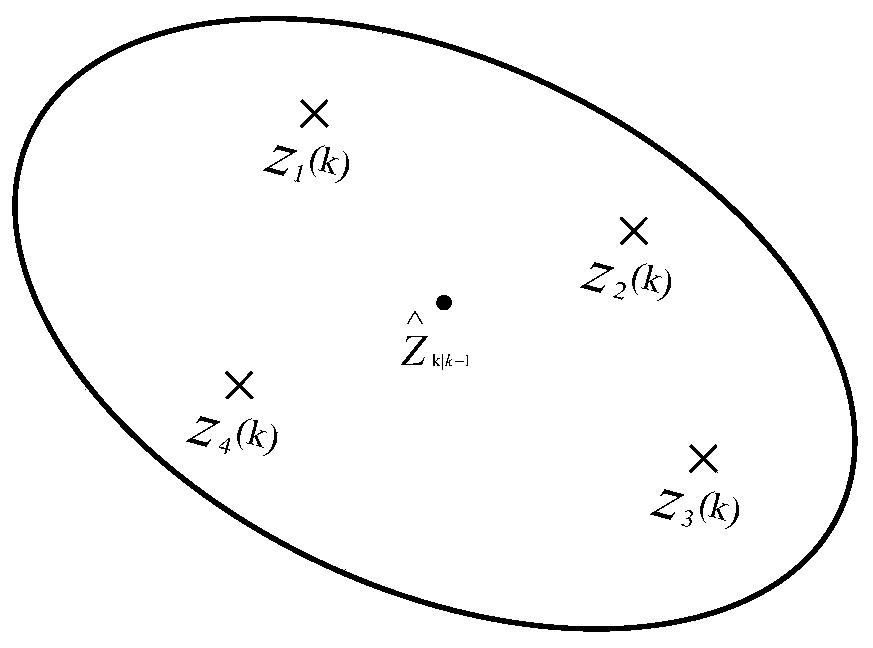
[0079] Step 2: Multi-Sensor Data Association
[0080] The Global Nearest Neighbor Algorithm (GNN) is used to correlate the data of the target obtained by the radar and the camera with the target source, so as to determine which...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap