

Bionic robotic fish
A robotic fish and steering gear technology, applied in the field of bionic robotic fish, can solve the problems of inability to take into account high-speed swimming, low-speed maneuvering and good stability, insufficient swimming performance of bionic robotic fish, etc., so as to facilitate low-speed observation and obstacle avoidance, Improve the effect of intelligent regulation and high-performance sports and visual field stabilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the embodiments, technical solutions and advantages of the present invention more obvious, the technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. Example. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
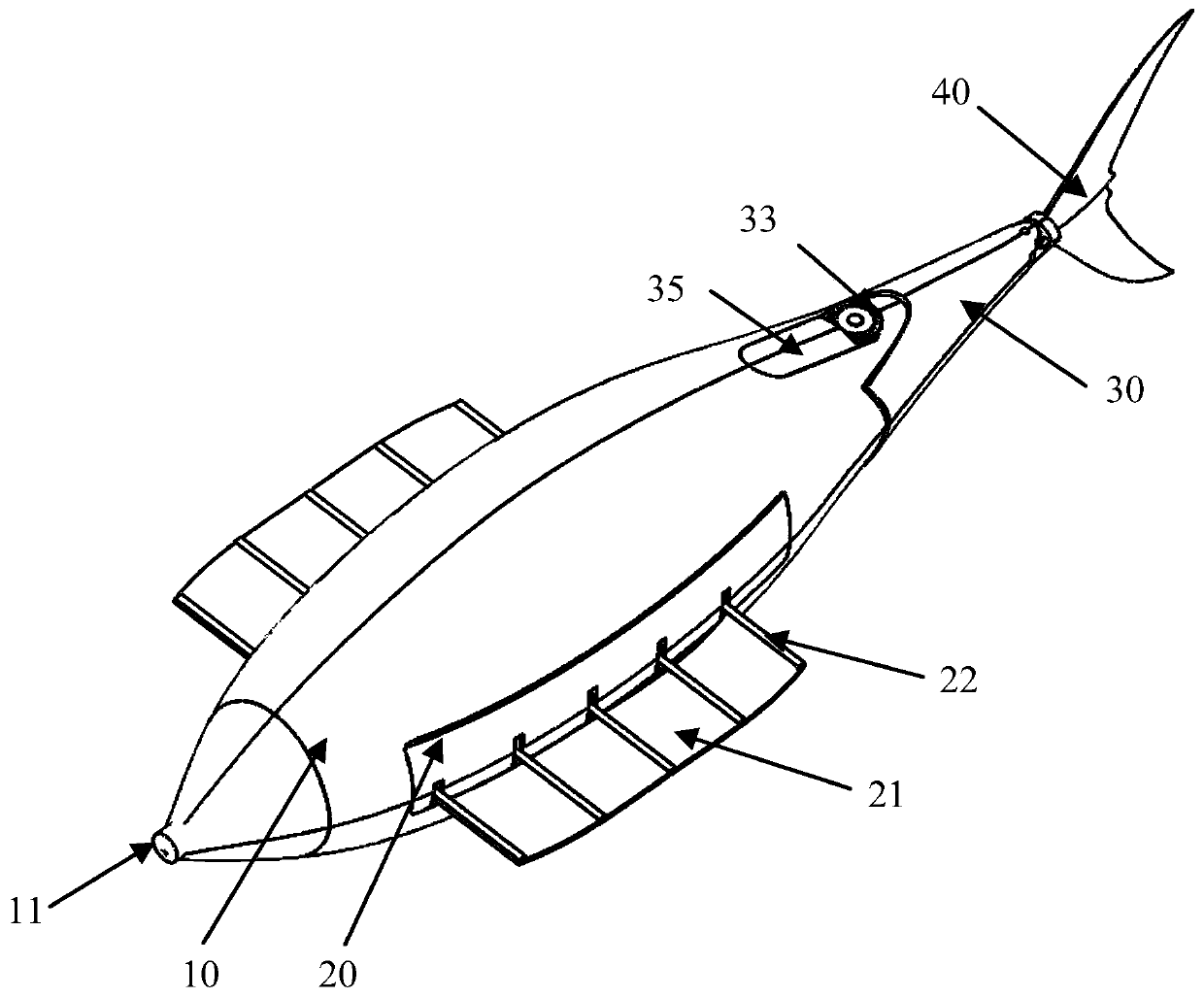
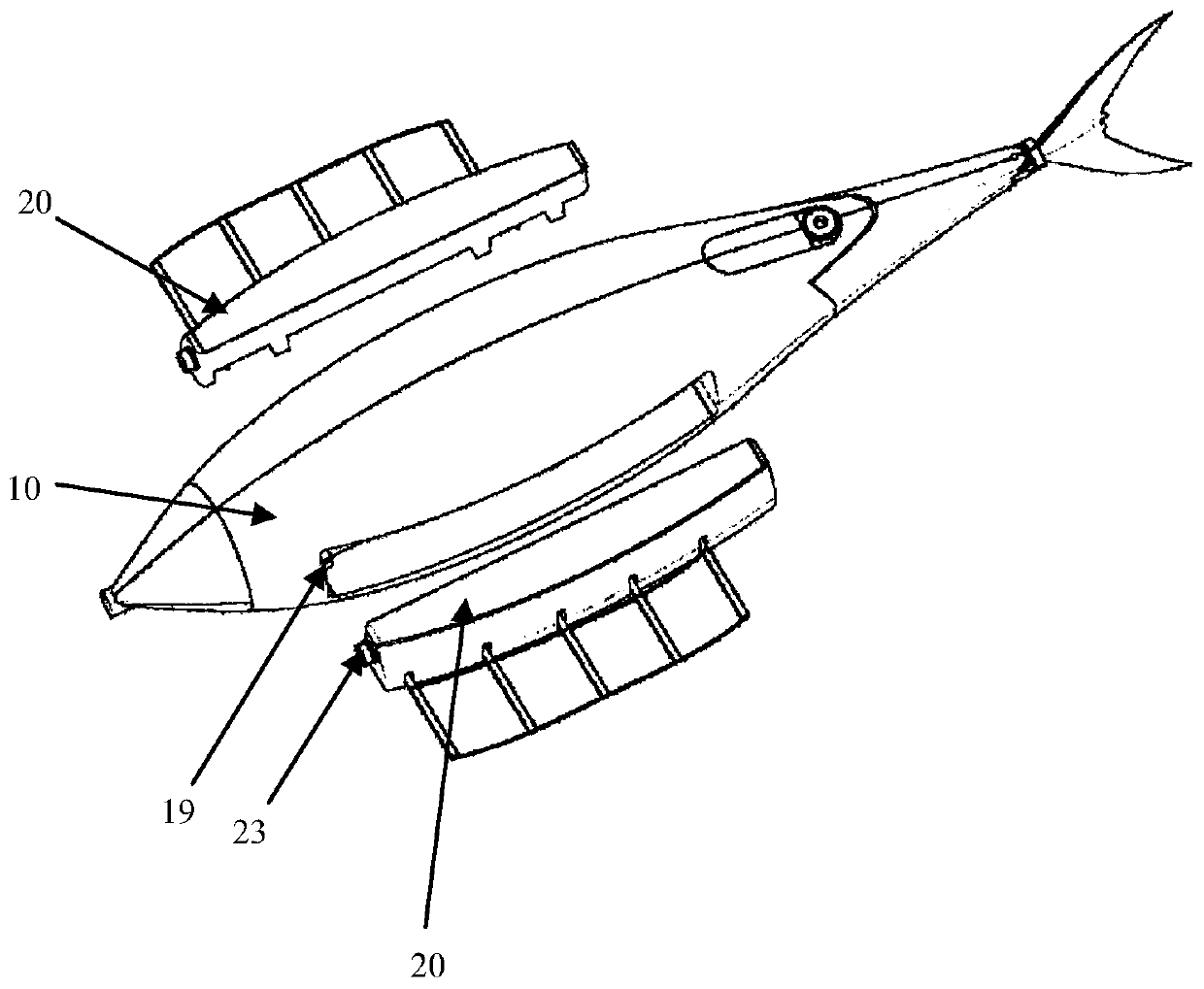
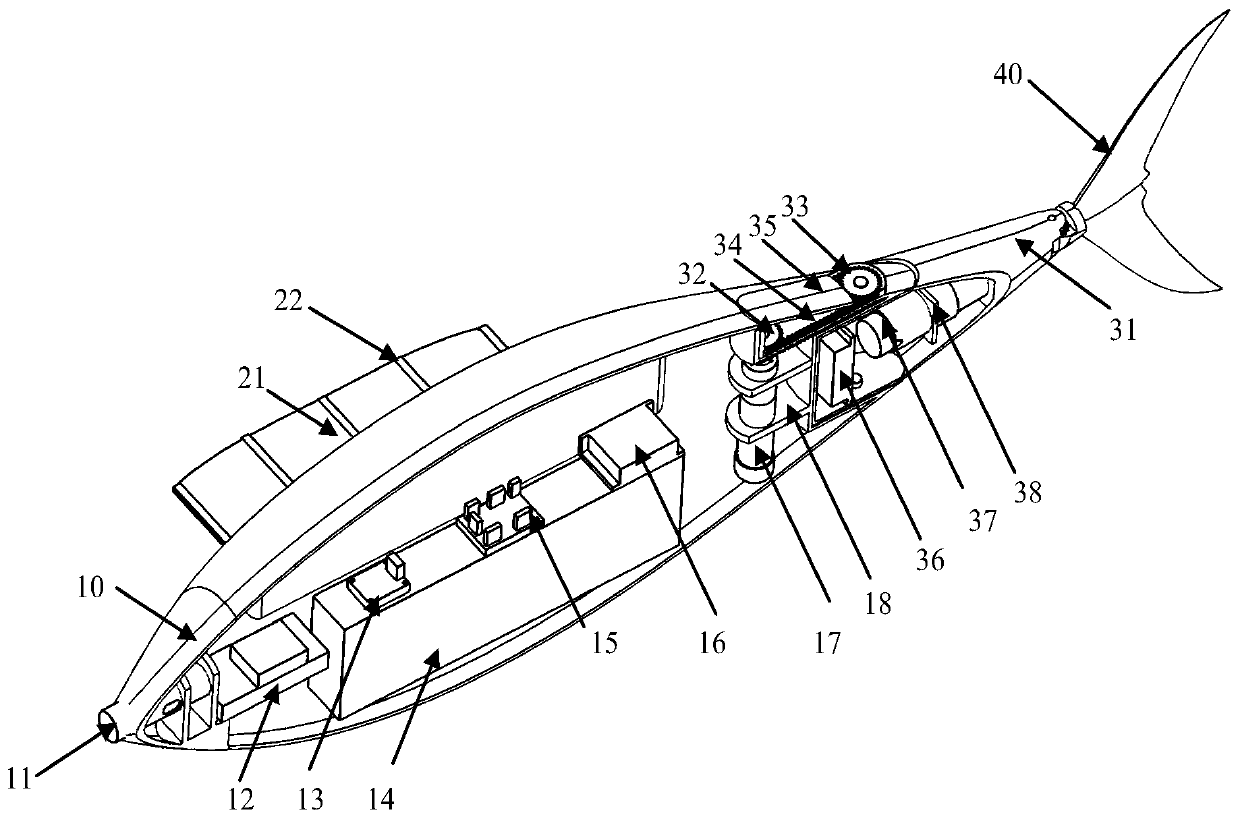
[0030]The bionic robotic fish of the present invention mainly comprises a main body cabin module, a tail cabin module, a tail fin, and a pair of pectoral fin modules that are independently sealed, and the pair of pectoral fin modules are symmetrically distributed on the left and right sides of the main body cabin module, and the tail cabin module and the tail fin module are sequentially conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More