

High-precision indoor three-dimensional positioning method based on UWB (ultra-wideband), optical flow and inertial navigation
A technology of three-dimensional positioning and inertial navigation, which is applied in navigation, surveying and mapping and navigation, navigation computing tools, etc., can solve the problems of heavy workload, high hardware cost and construction cost, and the inability to achieve effective indoor positioning in places with signals, etc., to achieve high Positioning accuracy, reduction of base station layout and positioning effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038]The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
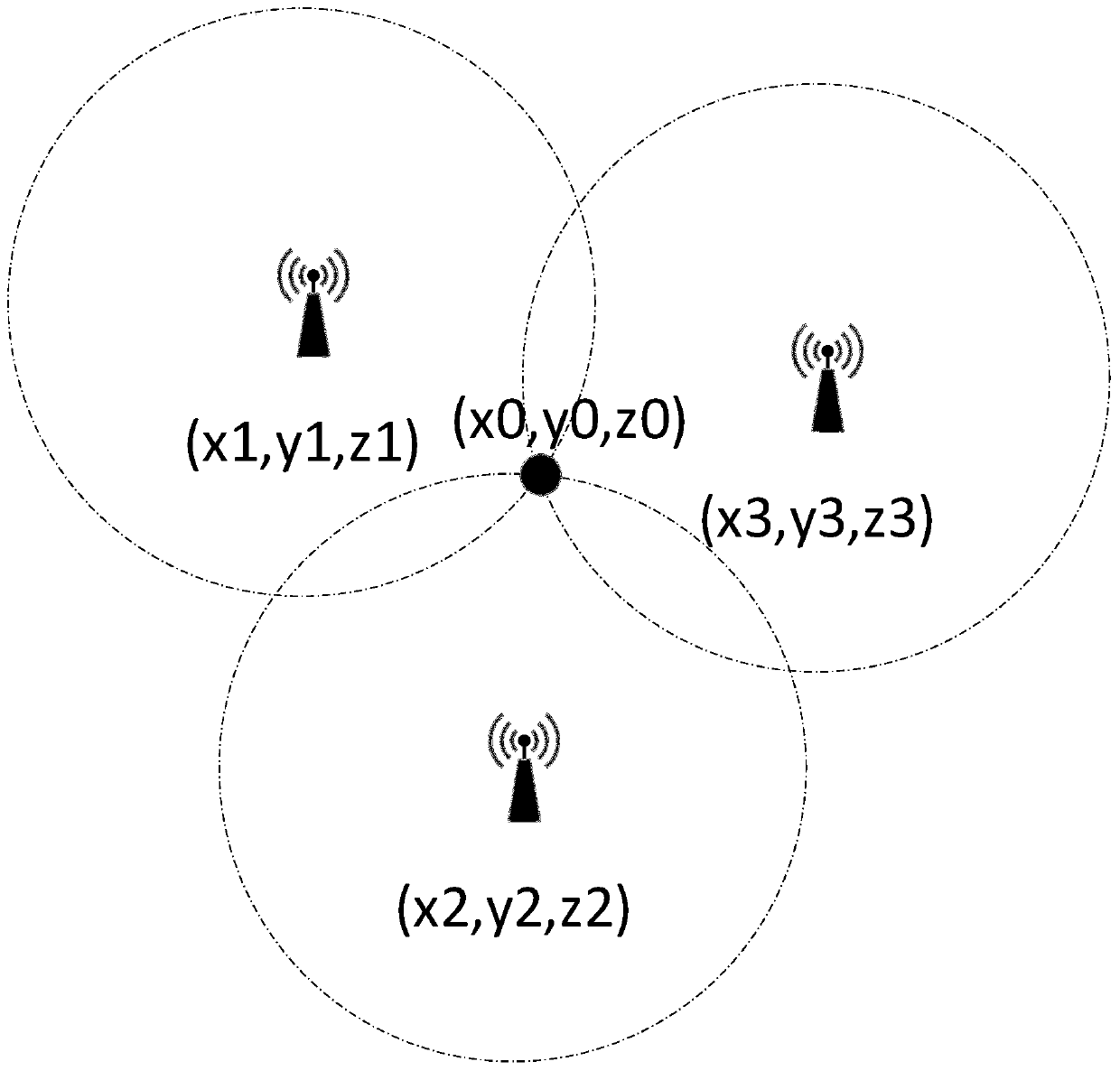
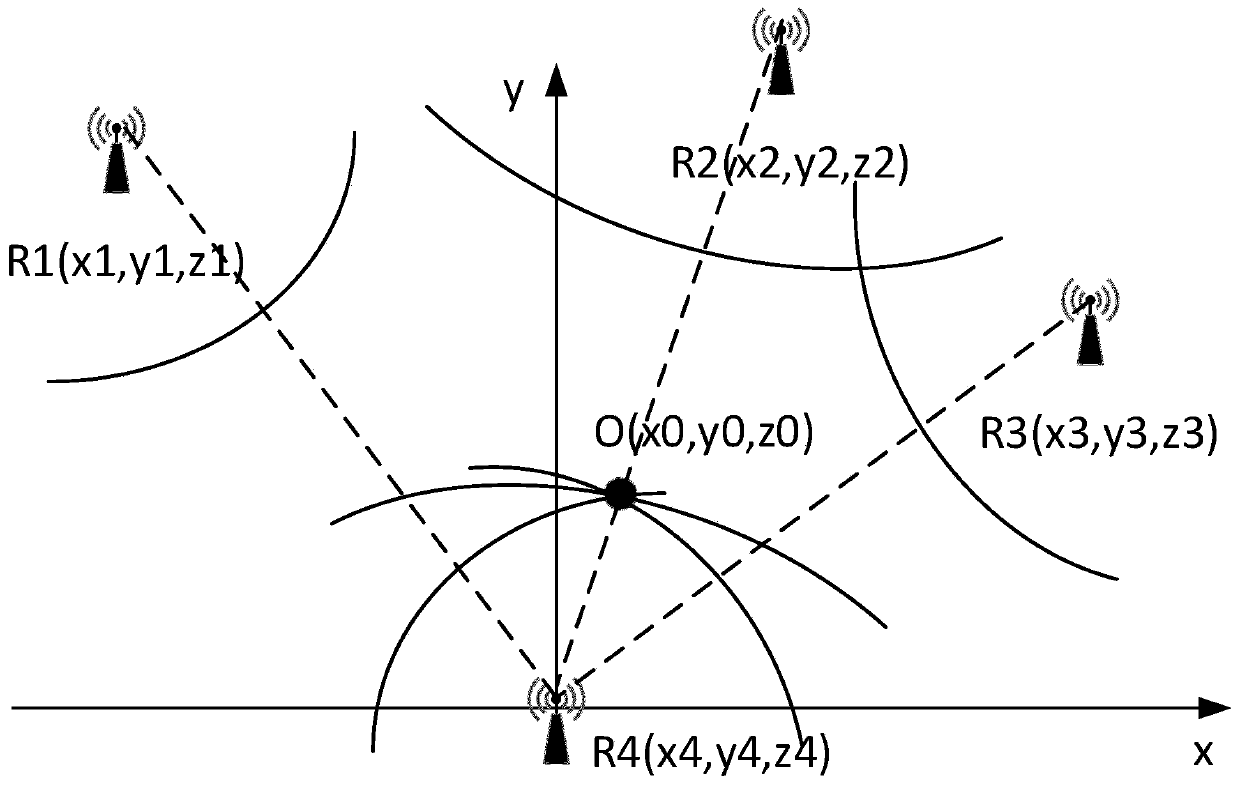
[0039] The present invention proposes a high-precision indoor three-dimensional positioning method based on UWB, optical flow and inertial navigation. Fusion of optical flow sensor, magnetic sensor, ultra-wideband positioning and other information to measure the speed, position, and attitude information of the carrier; the specific indoor three-dimensional positioning process includes:
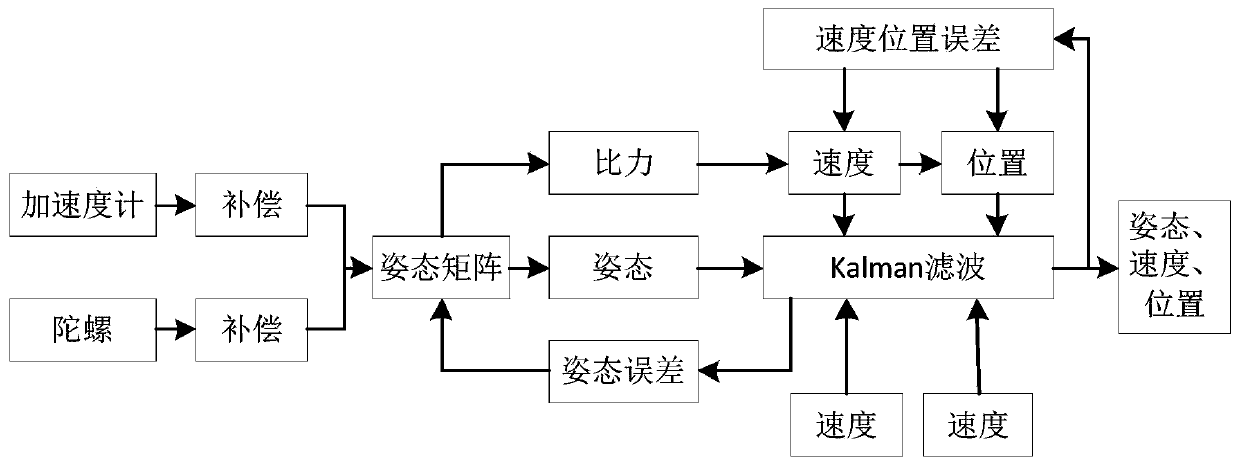
[0040] The inertial sensor includes an accelerometer and a gyroscope, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More