

Unmanned aerial vehicle ground target self-adaptive tracking method based on CS model
An adaptive tracking and unmanned aerial vehicle technology, applied in the field of signal processing, can solve problems such as the decline of tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
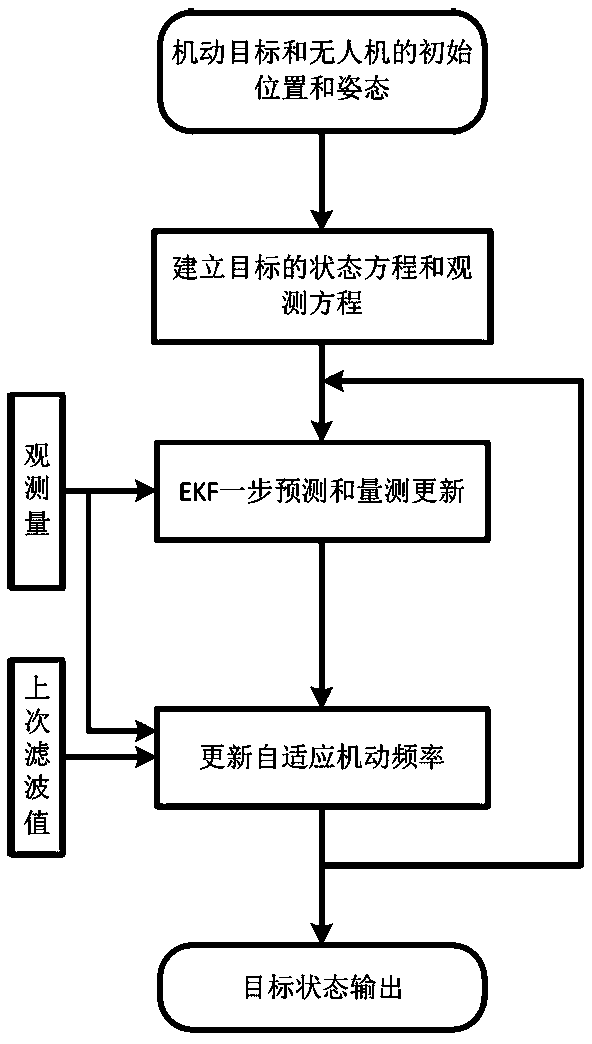
[0034] The invention is an adaptive maneuvering frequency EKF (Extended Kalman Filter) filtering algorithm based on a CS model. combine figure 1 Shown algorithm flow chart, its specific implementation mode is:
[0035] Step 1: First determine the state vectors of the target and the UAV, and specify their initial position and attitude and other information.
[0036] The research object of the present invention is a ground target, and its state vector includes two directions of x and y:
[0037]
[0038] Among them, x y represents the current position of the target, Indicates the current speed of the target in the x y direction, Indicates the current acceleration of the target in two directions.
[0039] The kinematic equation of the target can be described as:
[0040]
[0041] Set the height of the drone to h U and airspeed v 0 Keeping it unchanged, the state vector describing the position and attitude of the UAV is:
[0042] x U =[x U ,y U ,Ω,ω] T
[0043...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More