Target searching method through coordinating of multiple underwater robots
An underwater robot and target search technology, which is applied in the field of multi-underwater robot collaborative target search, can solve problems such as overshooting, distance measurement information errors, and reduced operating efficiency, so as to meet the needs of search operations, increase system complexity, and improve equipment. cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with the accompanying drawings.
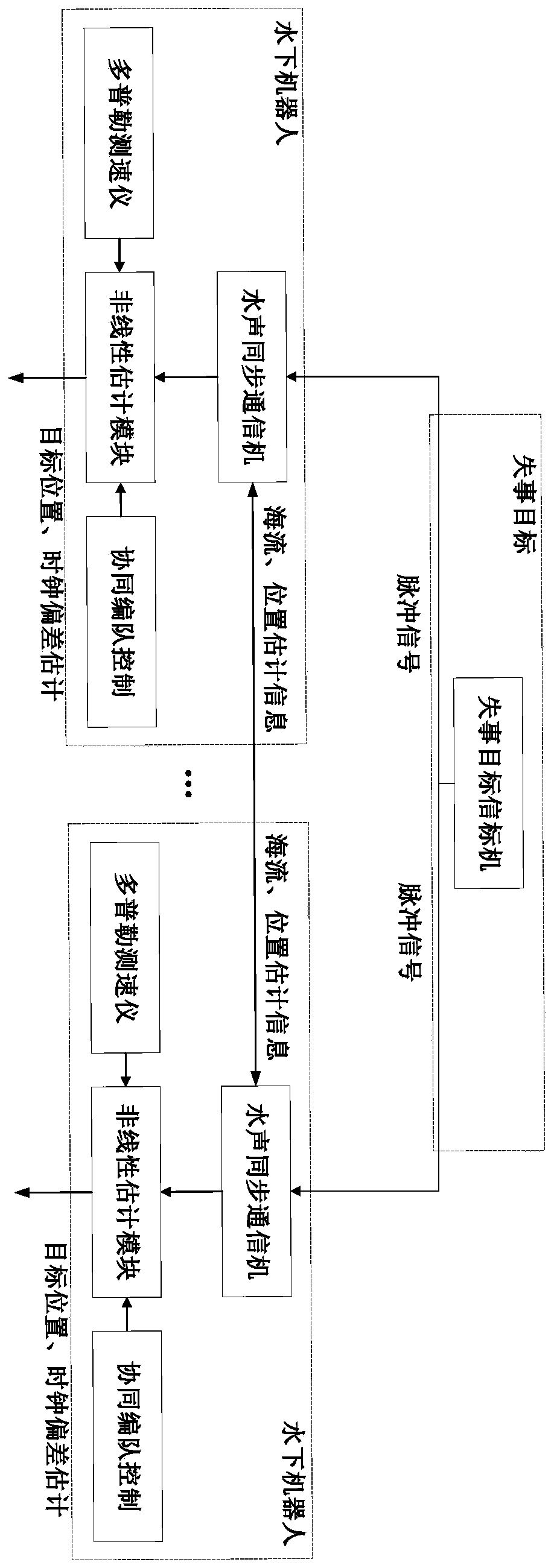
[0023] The invention discloses a multi-underwater robot cooperative target search method, which comprises a Doppler speedometer module, an underwater acoustic synchronous communicator module, a nonlinear estimation module, and a cooperative formation control module. In the process of multi-underwater robot system searching for deep-sea wrecked active targets, the underwater robot uses the underwater acoustic synchronous communication module to send its own position information, ocean current estimation information, target position estimation information and target clock bias estimation information. On the basis of the convective speed measurement information obtained by the speedometer module, the estimation of the ocean current velocity, the target position and the target clock deviation is realized through the nonlinear estimation module. At the same time, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com