DDPG-based unmanned aerial vehicle autonomous guidance control method
A guidance control and UAV technology, applied in control/regulation systems, non-electric variable control, 3D position/channel control, etc. The effect of enhancing autonomy and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
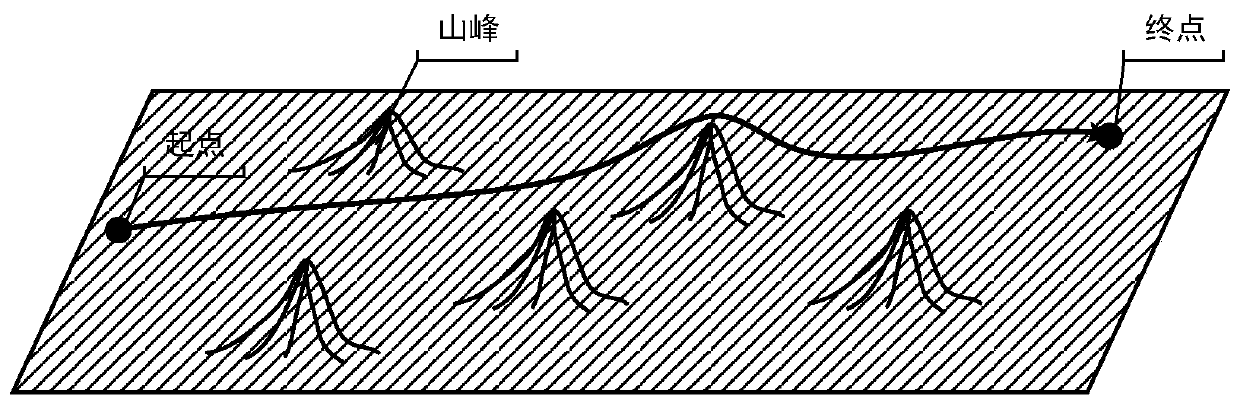
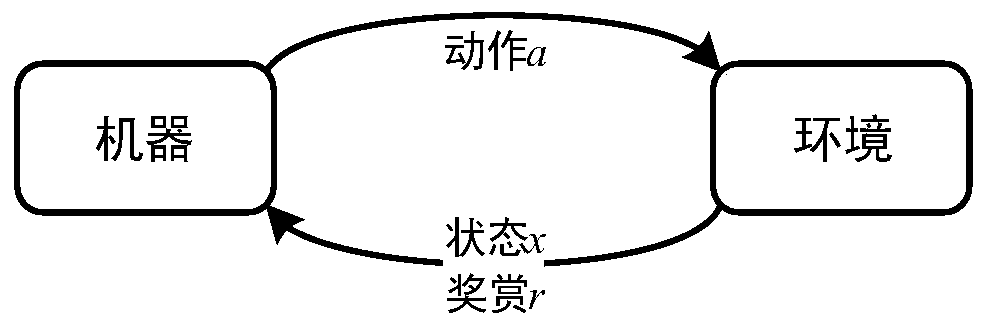
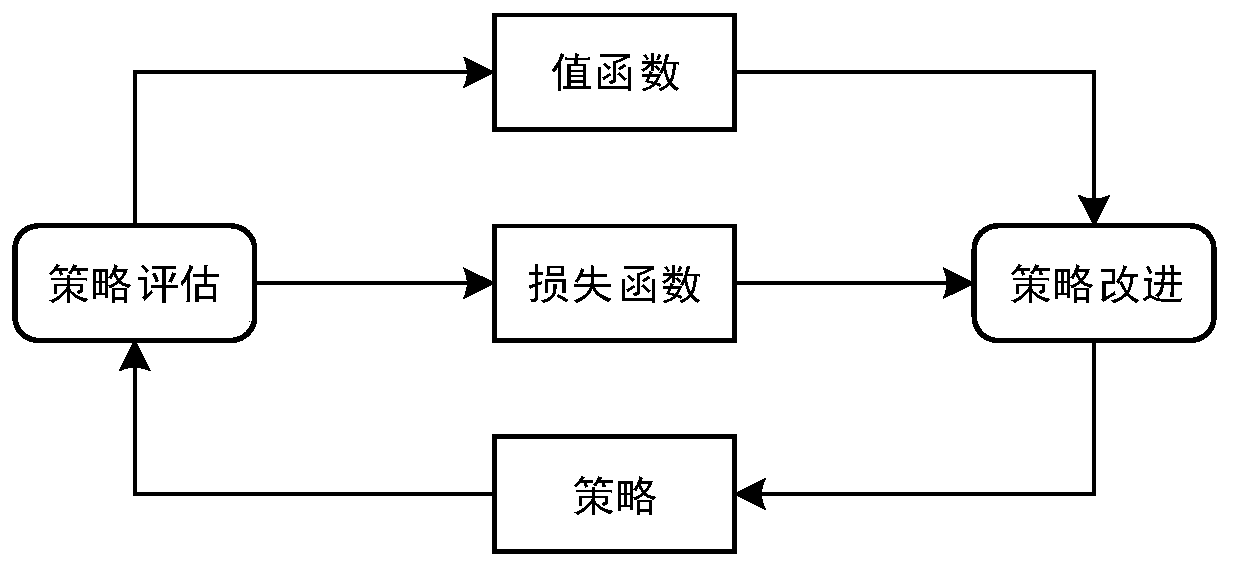
[0030]Based on artificial intelligence technology, the present invention proposes a DDPG-based autonomous guidance and control method for UAVs. The method performs training and learning in a pre-established task environment, generates UAV control quantities based on environmental feedback, and then guides and controls UAVs. flight maneuvers. This method can improve the self-guided flight capability of the UAV, and fly safely and quickly from the starting point to the end point.
[0031] The realization process of the present invention comprises the following steps:
[0032] 1. Establish the three-degree-of-freedom motion model of the UAV.
[0033]
[0034] In the formula, N x is the tangential overload of the UAV in the aircraft coordinate system, N y is the normal overload in the aircraft coordinate system, v is the speed of the UAV, θ is the inclination angle of the UAV track, ψ c is the UAV track deflection angle, γ c is the velocity tilt angle, x, y and z are the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com