

Six-degree-of-freedom hydraulic mechanical arm
A technology of hydraulic machinery and degrees of freedom, used in manipulators, claw arms, manufacturing tools, etc., can solve the problems of less freedom of manipulators, single manipulators, high cost, low protection level requirements, high-precision positioning, and compact structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in further detail below in conjunction with the accompanying drawings.
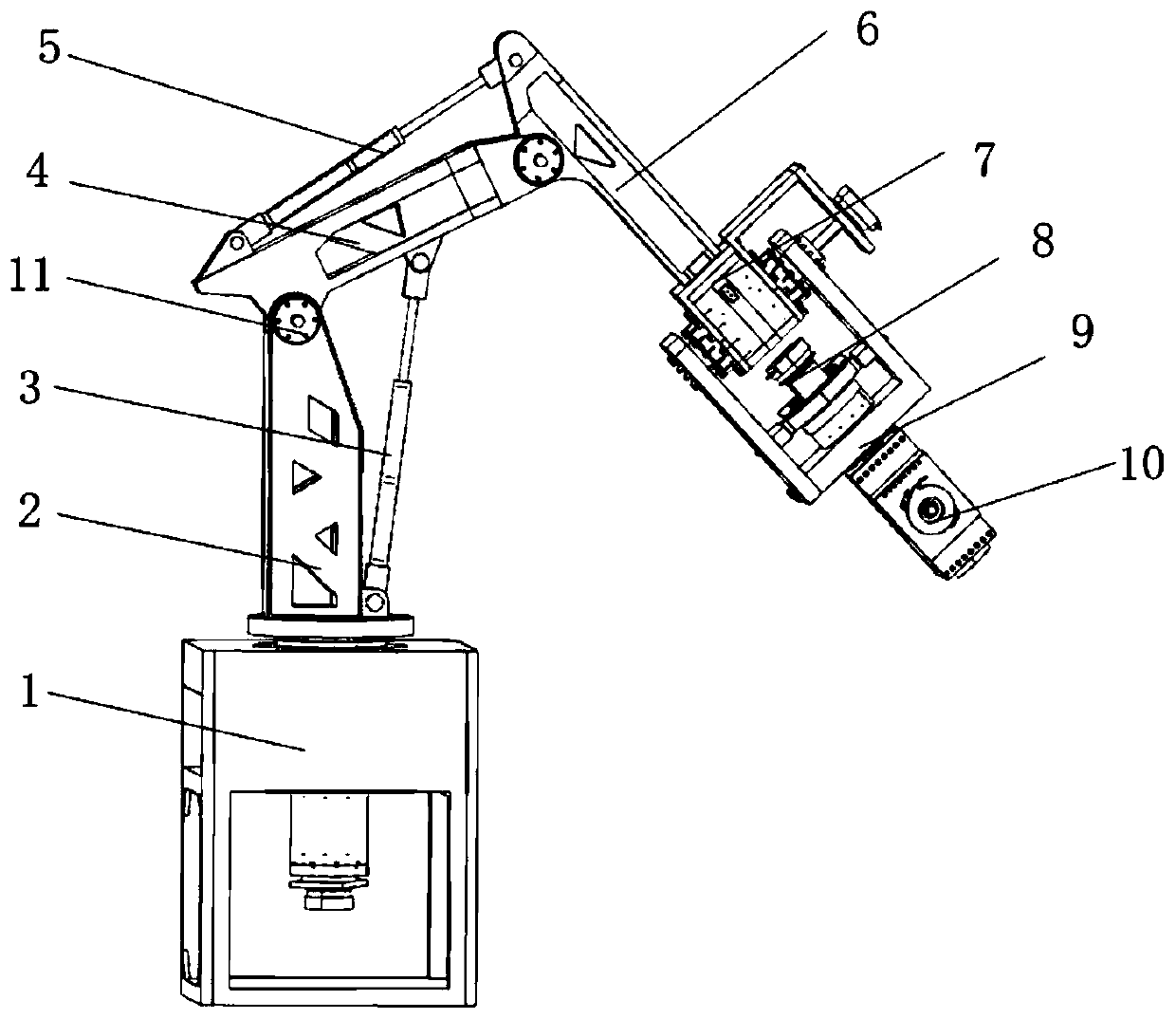
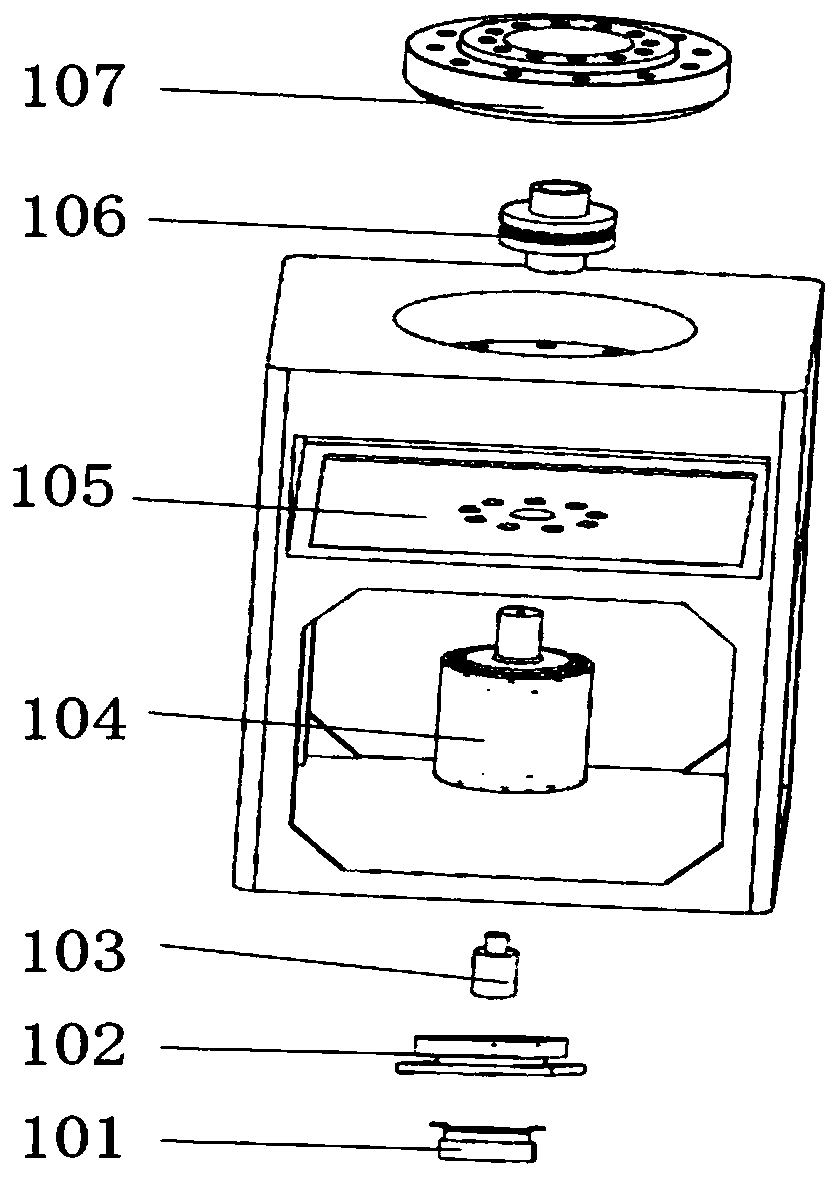
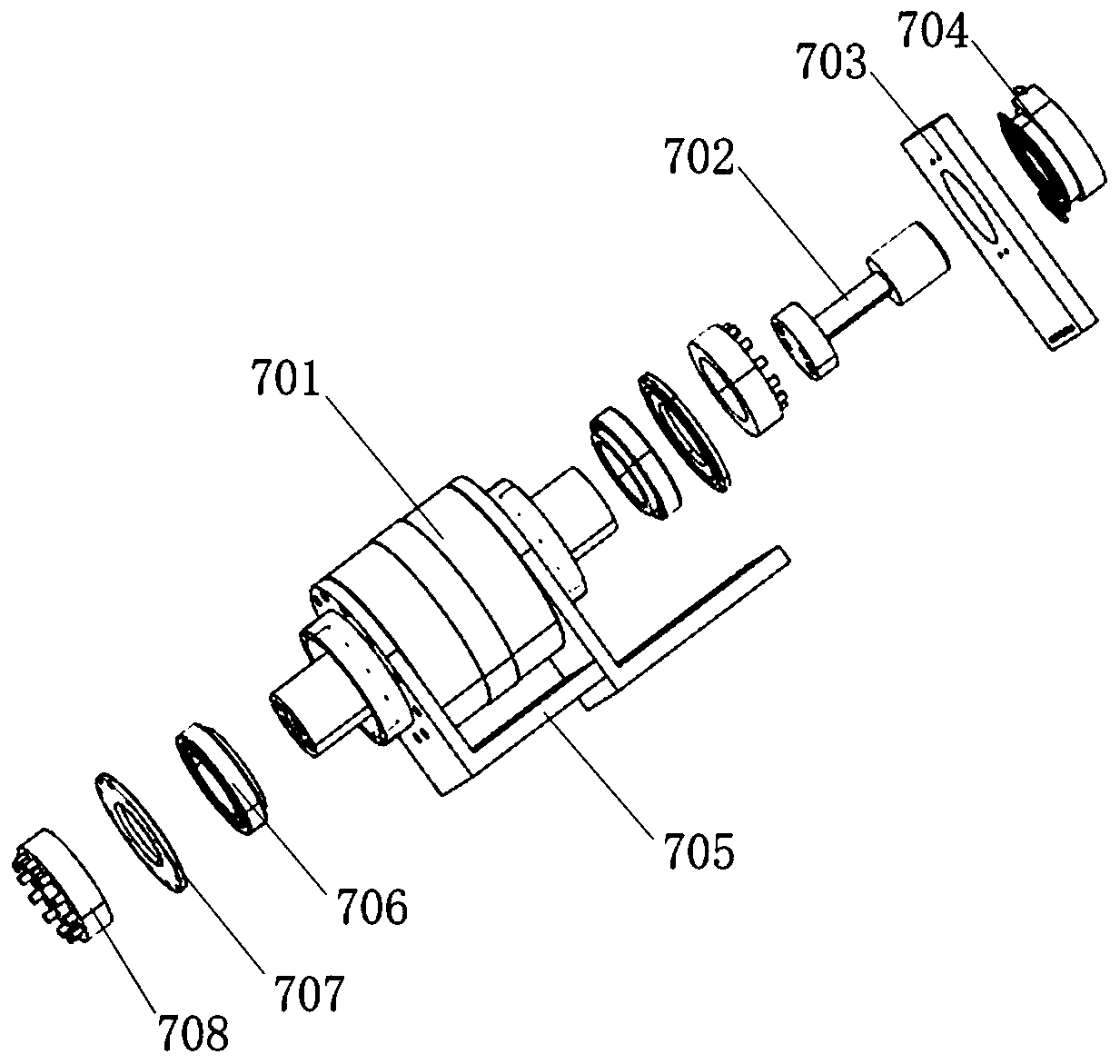
[0015] combine Figure 1 to Figure 6 , a six-degree-of-freedom hydraulic mechanical arm according to the present invention includes a base rotary joint 1, a large arm 2, a first telescopic joint 3, a first mechanical arm 4, a second telescopic joint 5, a second mechanical arm 6, and a swing Joint 7, roll joint 8, roll support 9, pitch joint 10 and two bearing assemblies 11. A total of six degrees of freedom are set, including a large arm rotation degree of freedom, two telescopic degrees of freedom, a swing degree of freedom, a rolling degree of freedom and a pitching degree of freedom at the wrist of the mechanical arm. The base rotary joint 1 can realize 270-degree reciprocating rotary motion. One end of the big arm 2 is fixed on the top surface of the base rotary joint 1, and the other end is rotationally connected with one end of the first mechanical arm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More