Acceleration slip regulation control method and system based on road surface recognition
A road surface recognition and pre-control technology, which is applied in the direction of control drive, control device, electric vehicle, etc., can solve problems such as untimely control, excessive slip rate, and risk of vehicle instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
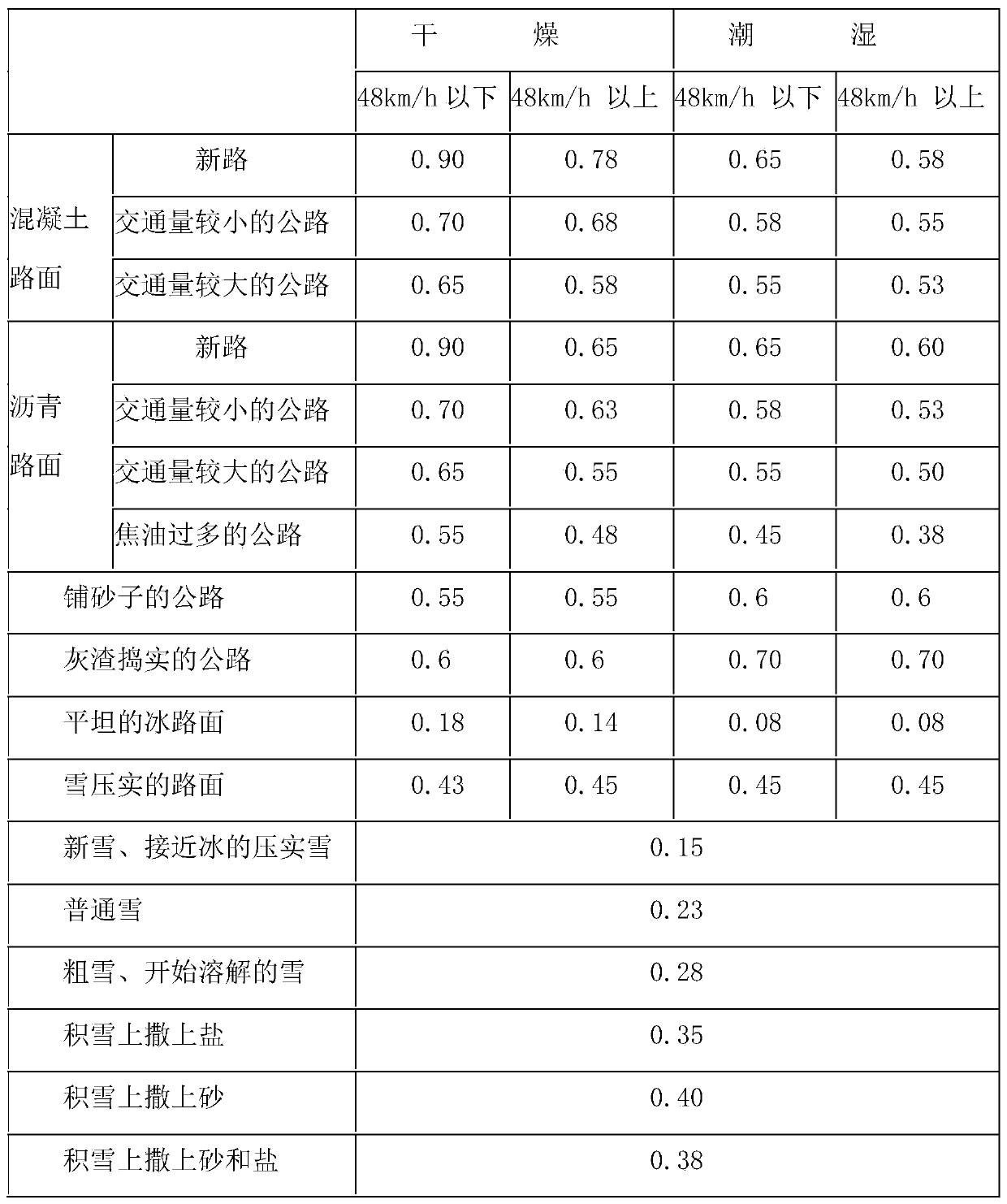
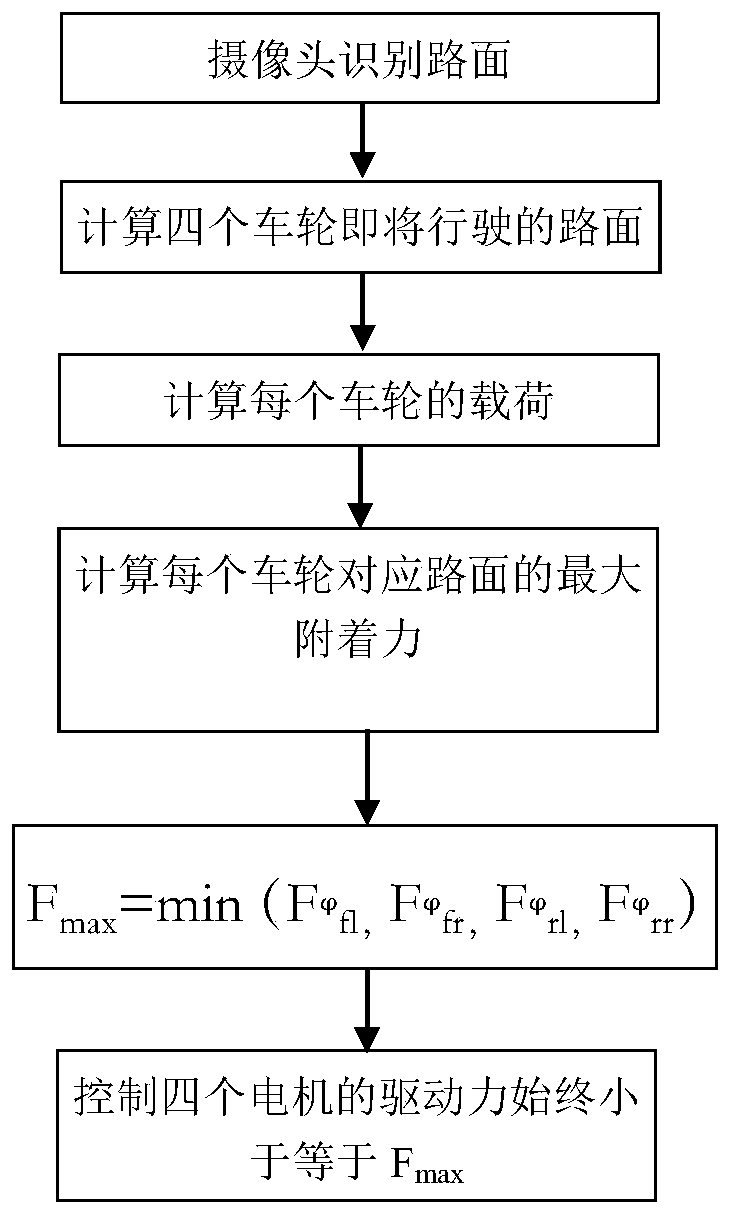
[0035] refer to Figure 1 ~ Figure 4 , which is the first embodiment of the present invention, provides a driving anti-slip pre-control method based on road surface recognition, such as figure 2 , a driving anti-slip pre-control method based on road surface recognition includes: using the camera on the vehicle to detect and identify the road surface; calculating the road surface that the four wheels will drive; using the force sensor to calculate the load of each wheel; using the road surface adhesion coefficient to define the formula and adhesion The coefficient table calculates the maximum adhesion of each wheel corresponding to the road surface The maximum value of the driving force obtained for each wheel is Control the driving forces of the four motors to be always less than or equal to Fmax.
[0036] Specifically, refer to Figure 4 The calculation of the road on which the four wheels are about to travel includes obtaining data such as vehicle speed, steering wheel...
Embodiment 2
[0053] refer to Figure 5 , is the second embodiment of the present invention. This embodiment is different from the first embodiment in that it provides a driving anti-slip pre-control system based on road surface recognition, which includes an identification module 100, a calculation module 200 and a control module. 300. The identification module 100 uses two cameras installed at the front bumper of the vehicle to identify the road surface that the left and right wheels are about to drive through, and through the identification of the state of the road surface, respectively determine the slip rate limit of the high and low adhesion coefficient road surface, Control the road surface adhesion utilization ratio of each wheel to the vicinity of the maximum value; the calculation module 200 calculates the minimum adhesion force that the road surface can provide by combining the vertical load of each wheel, calculates the relevant data formula, and obtains the maximum value of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More