

Navigation attitude method for vehicle-mounted azimuth open-loop horizontal attitude angle closed loop
A horizontal attitude and closed-loop technology, applied in the field of unmanned driving system research, can solve problems such as misjudgment of navigation actuators and attitude errors, and achieve the effect of eliminating errors and improving navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
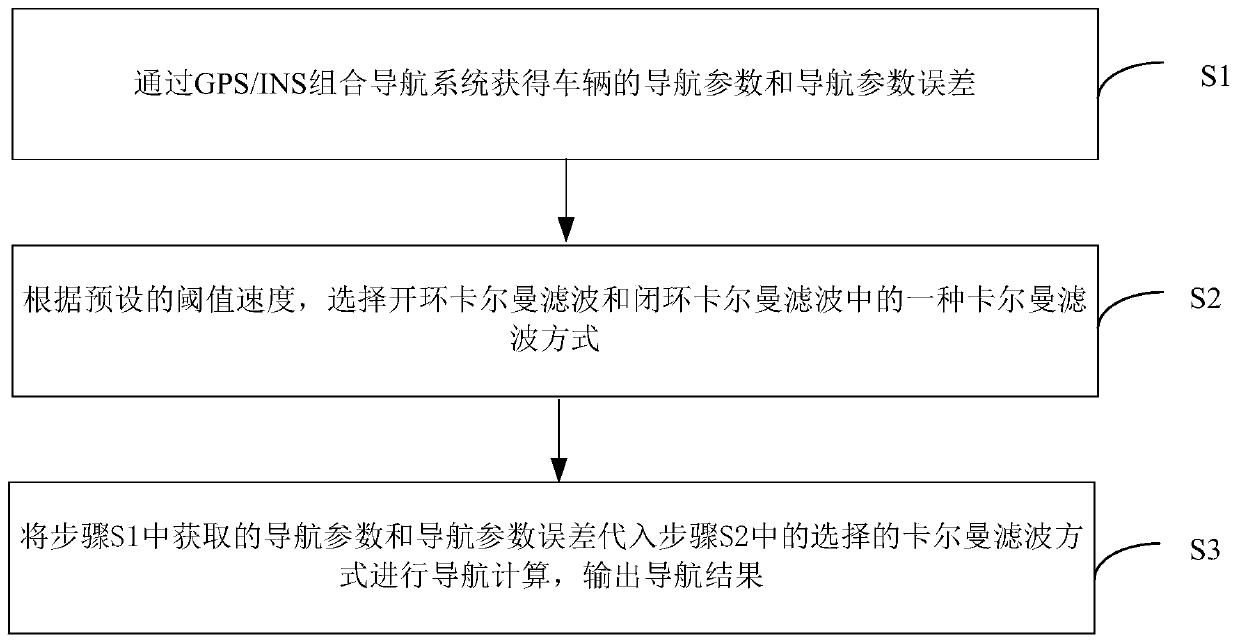
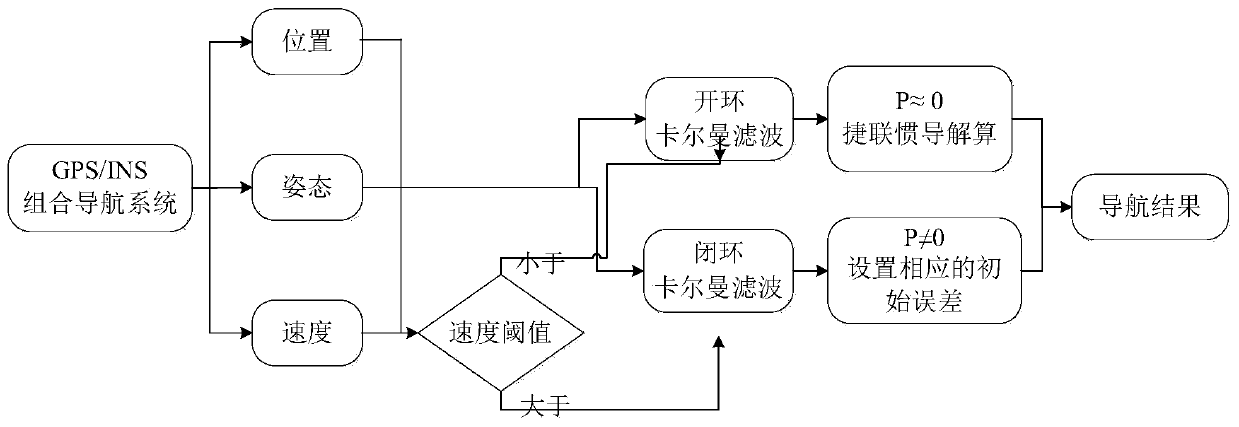
[0054] Such as Figure 1-2 As shown, the embodiment of the present invention provides a heading attitude method for open-loop horizontal attitude angle closed-loop vehicle-mounted azimuth, including:
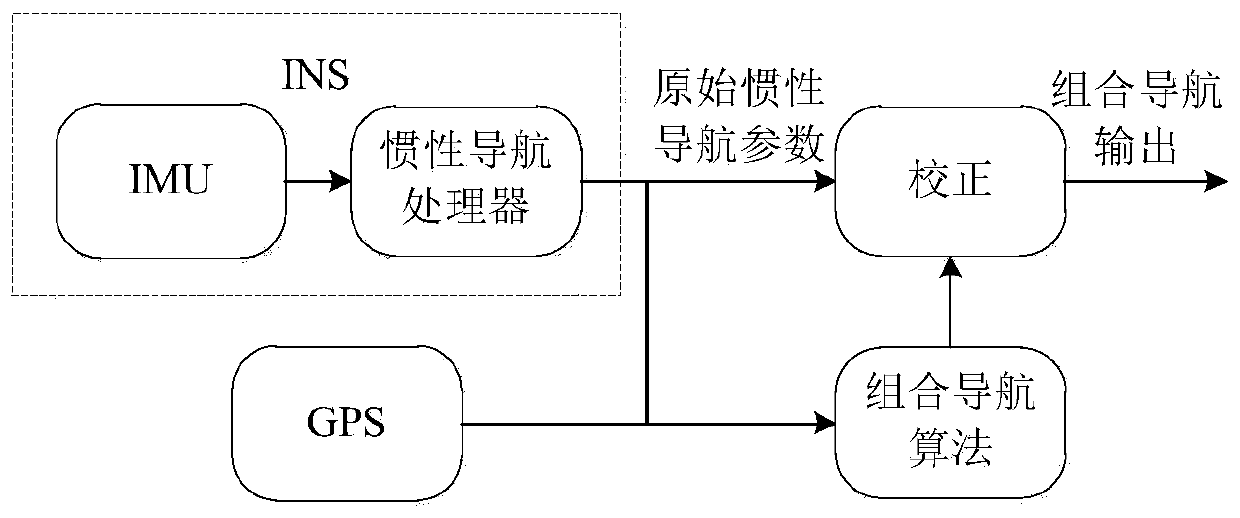
[0055] S1. Obtain the navigation parameters and navigation parameter errors of the vehicle through the GPS / INS integrated navigation system, and the navigation parameters include the attitude, speed and position of the vehicle;
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More