

Automatic control method and device in operation process of robot
A robot and controller technology, applied in the field of automatic control methods and devices in the process of robot operation, can solve the problem of high robot use cost, achieve the effects of reducing control cost, reducing use cost, and ensuring speed and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
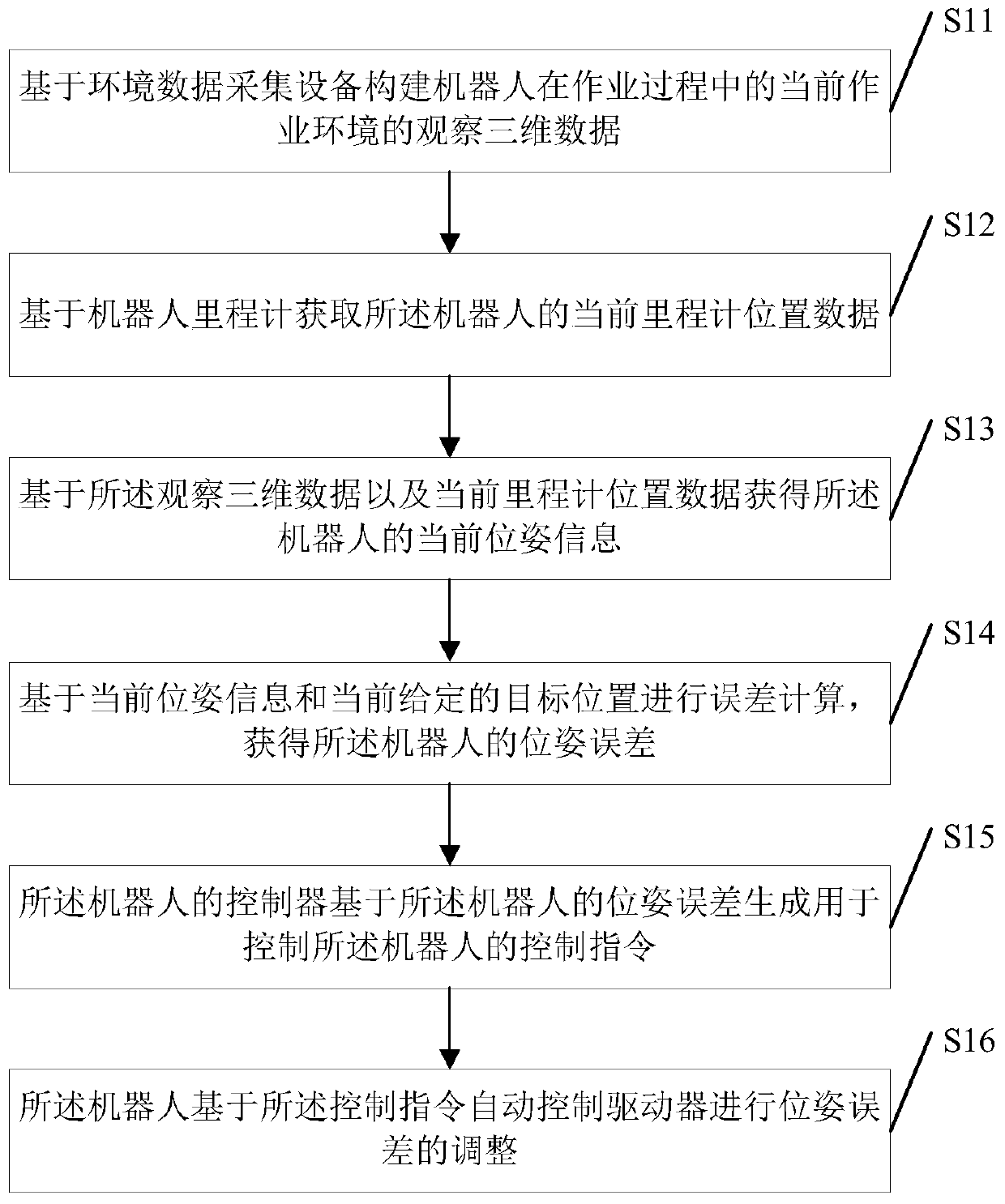
[0044] See figure 1 , figure 1 It is a schematic flow diagram of an automatic control method in a robot operation process in an embodiment of the present invention.
[0045] Such as figure 1 As shown, an automatic control method in a robot operation process includes:
[0046] S11: Based on the environmental data collection equipment, construct the observation three-dimensional data of the current operating environment of the robot during the operation;
[0047] In the specific implementation of the present invention, the construction of the observation three-dimensional data of the current operating environment of the robot in the operation process based on the environmental data collection equipment includes: the construction of the current operation of the robot in the operation process based on the laser sensor and the binocular video acquisition equipment Observation of three-dimensional data of the environment.
[0048] Further, the construction of the observation three-dimension...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More