

High-precision positioning system and positioning method based on vehicle-road cooperation
A vehicle-road coordination and positioning method technology, applied in satellite radio beacon positioning systems, radio wave measurement systems, road network navigators, etc. Avoid the effect of increasing, avoiding equipment and engineering implementation costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0068] The high-precision positioning method based on vehicle-road coordination, the specific content is as follows,
[0069] The first case: when the vehicle is running within the coverage of the UWB base station of the first node at the end of the field, the vehicle performs position calculation through the UWB module of the vehicle positioning terminal, and fuses it with the position information output by the IMU module, so that Obtain high-precision positioning information of the vehicle;
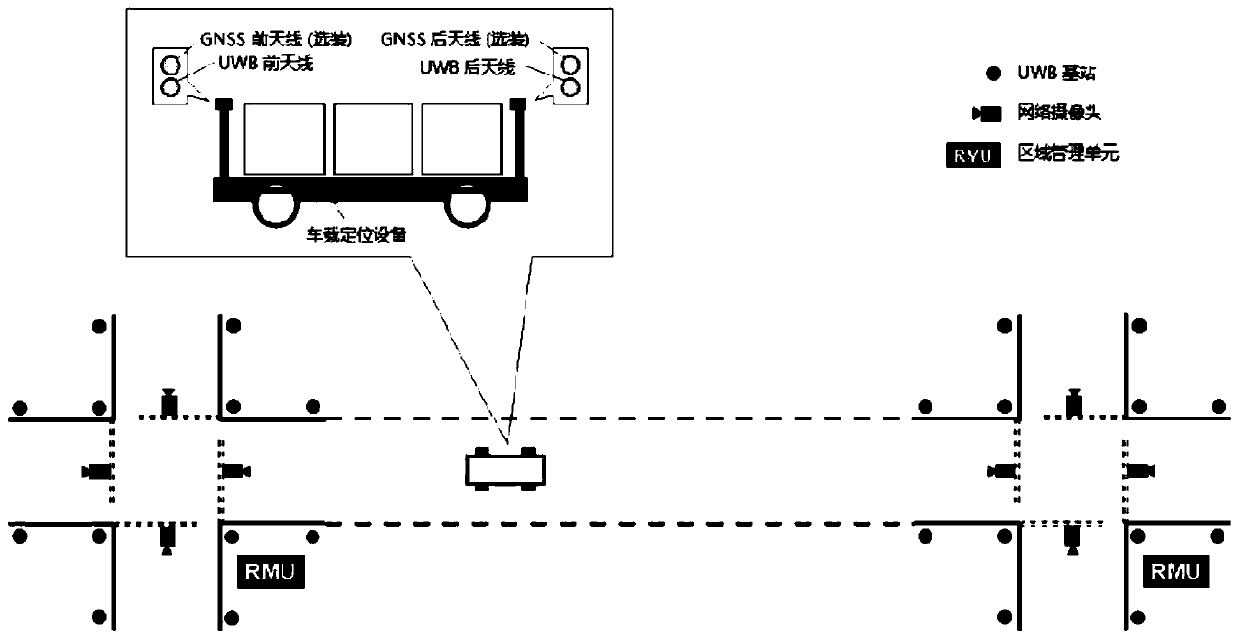
[0070] The second situation: when the vehicle has driven out of the coverage area of the UWB base station of the above-mentioned first node, and has entered the monitoring range of the network camera of the corresponding road section, the regional management unit to which the above-mentioned first node belongs will use the real-time information collected by the network camera Video data, to identify, track and estimate the target vehicle’s position, and send the result through remote ...
Embodiment 2
[0098] The high-precision positioning system based on vehicle-road coordination mainly includes two parts: the vehicle end and the field end. Among them, the vehicle consists of a vehicle-mounted positioning terminal (including core modules such as UWB, IMU, wireless communication, computing and processing, and an optional RTK module), UWB antennas (one pair at the front and rear), and GNSS antennas (one pair at the front and rear, optional )composition. The field end part is composed of several regional subsystems (usually deployed at various key nodes of the campus road network), and each regional subsystem includes a regional management unit (RMU), several UWB positioning base stations and network cameras.
[0099] exist figure 1 In the positioning system shown, the functions of the core components of the car end and the field end are as follows:
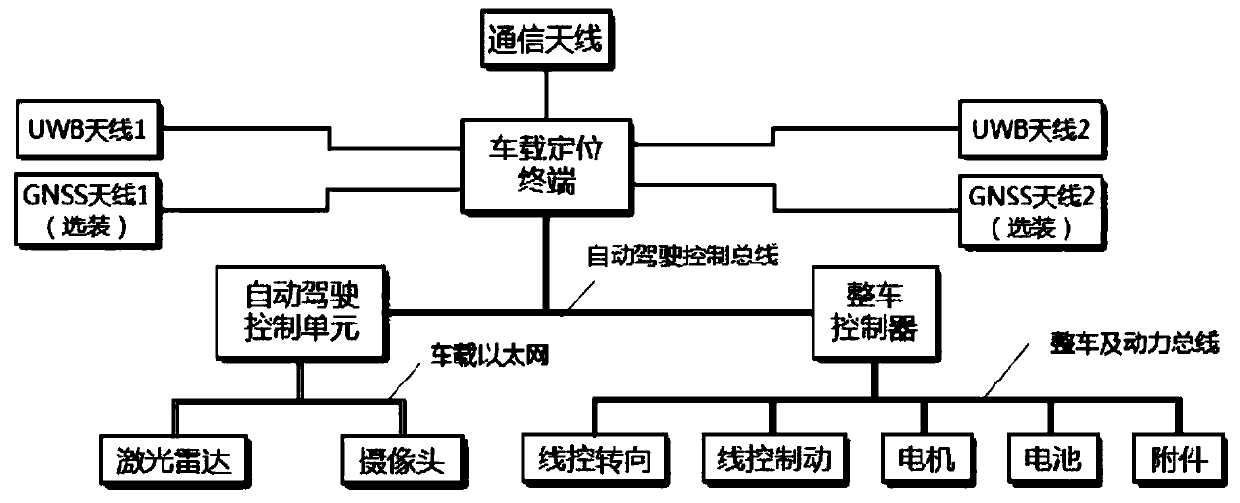
[0100] car end
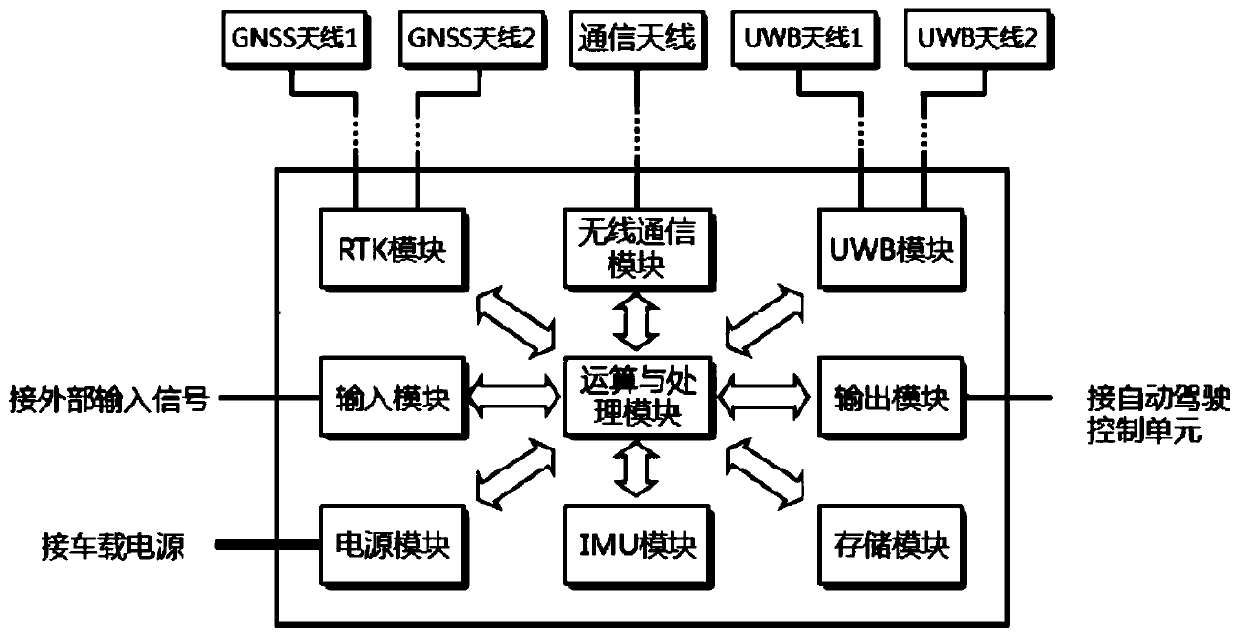
[0101] 1) Vehicle positioning terminal
[0102] The vehicle positioning terminal includes at least one UWB...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More