

Self-adaptive control method for energy coupling quadrotor unmanned aerial vehicle hanging air transportation system
A four-rotor UAV hanging, four-rotor UAV technology, applied in the direction of adaptive control, non-electric variable control, attitude control, etc., can solve the problem of ignoring or simplifying the effect of air resistance, no actual flight experiment, no Consider system parameters and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
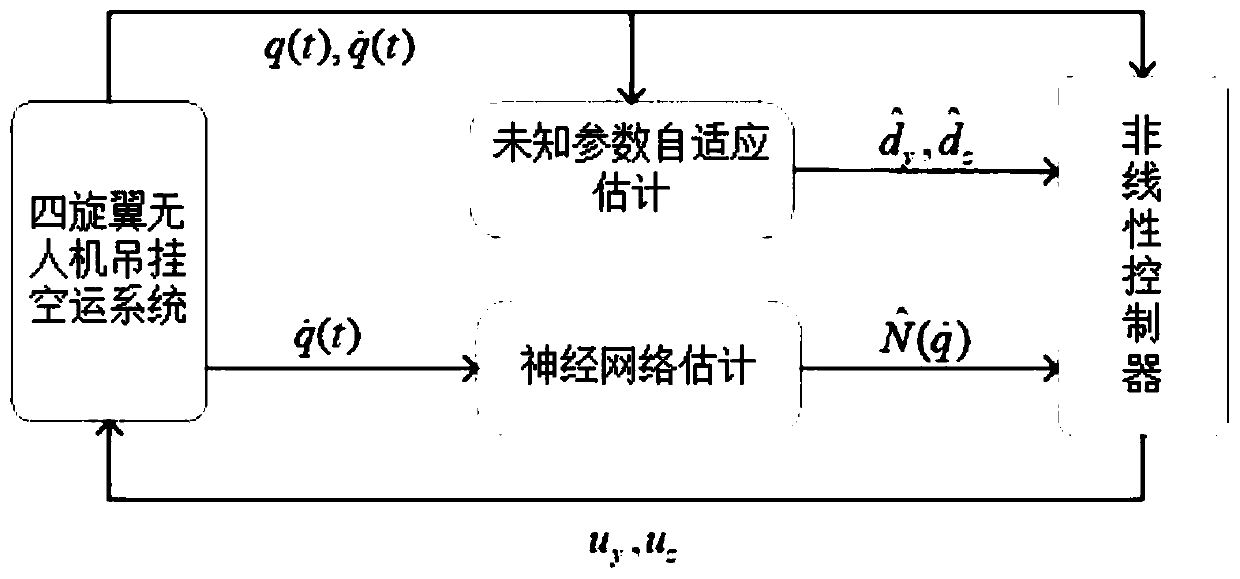
[0085] In order to overcome the deficiencies of the prior art, the present invention aims to propose an adaptive control method based on energy coupling. During the flight of the quadrotor UAV hanging air transport system, there are model uncertainties in the air resistance of the UAV and When the air damping coefficient is unknown, the position control of the quadrotor UAV and the rapid suppression of the load swing angle are realized. The technical solution adopted by the present invention is to construct a new type of energy storage function based on the energy shaping control method to deal with state coupling, then use the neural network to estimate the unmodeled dynamic characteristics online, and design the parameter adaptive law to estimate the unknown parameters online. System parameters, and a robust control algorithm based on sign functions is used to compensate the estimation error of the neural network. Including the following steps:
[0086] figure 1 It is a sc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More