

Mechanical arm end two-section-type stabilizing device for craniotomy
A technology of stabilizing device and robotic arm, which is applied in the field of medical equipment, can solve problems such as uneven mechanical characteristics of drilling and milling, affect the accuracy and quality of surgery, and endanger the life safety of patients, so as to improve the stability of force control, reduce weight, and offset self-weight Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
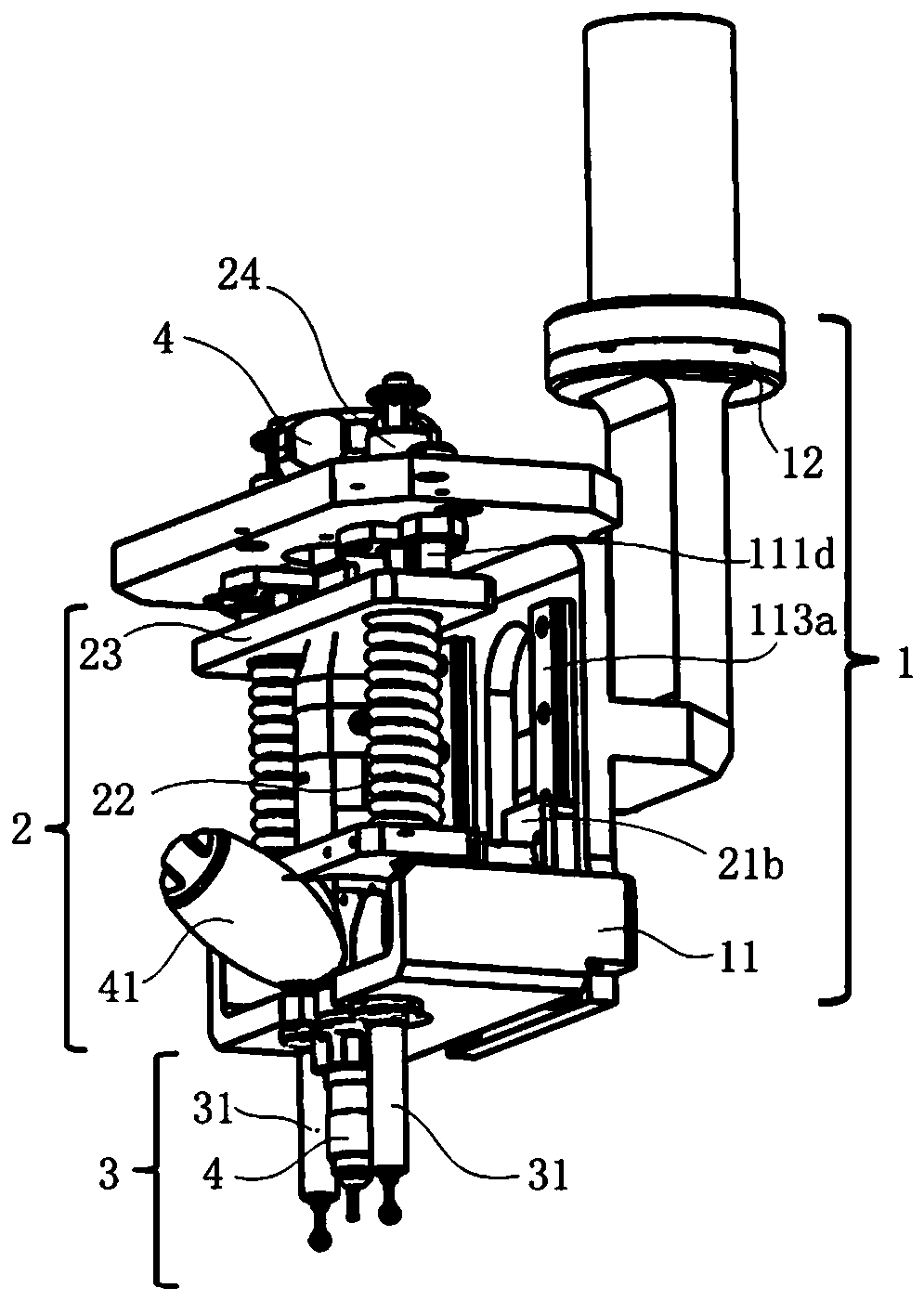
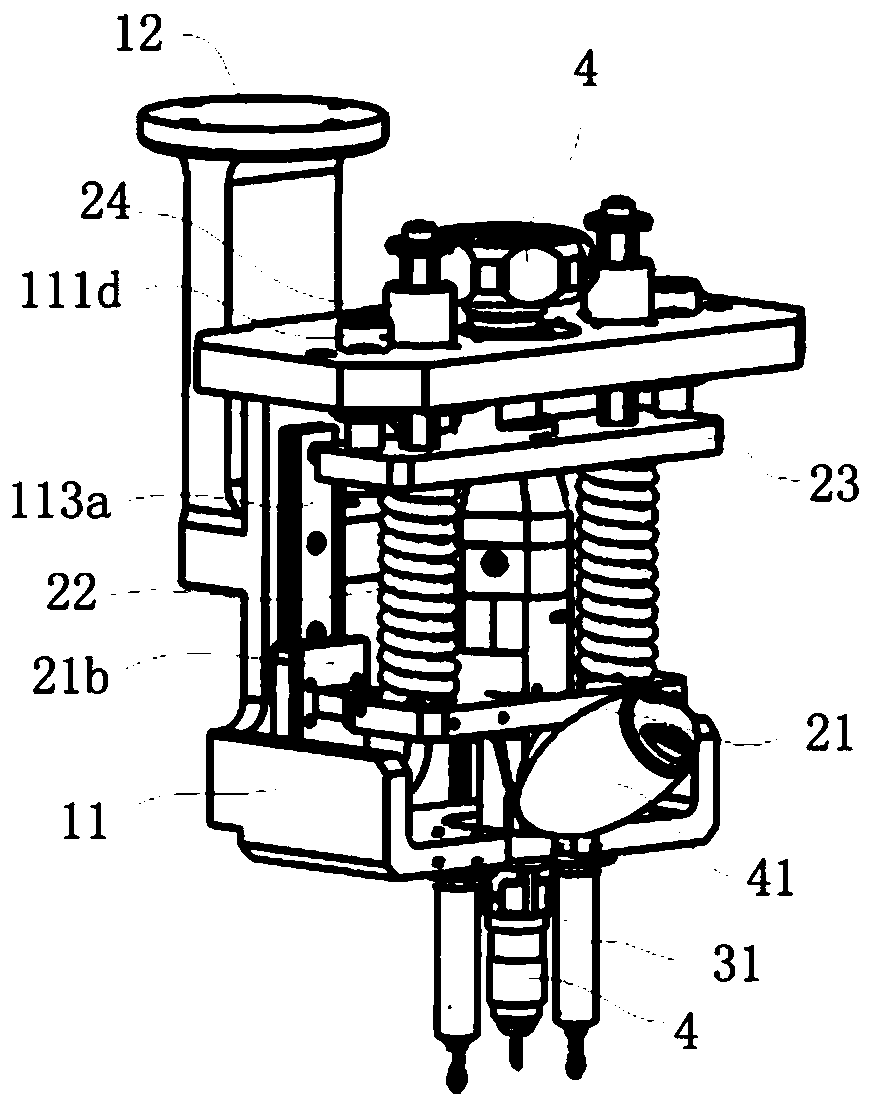
[0039] Such as figure 1 and figure 2 As shown, this embodiment provides a two-stage stabilizing device for the end of a manipulator for craniotomy, including a fixing module 1 , a primary cushioning module 3 and a secondary cushioning module 2 . The device is used to connect the drilling and milling instrument 4 for craniotomy with the end joint of the robotic arm, and under the operation of the doctor, the robotic arm is used to artificially guide the drilling and milling instrument 4 to complete the craniotomy.
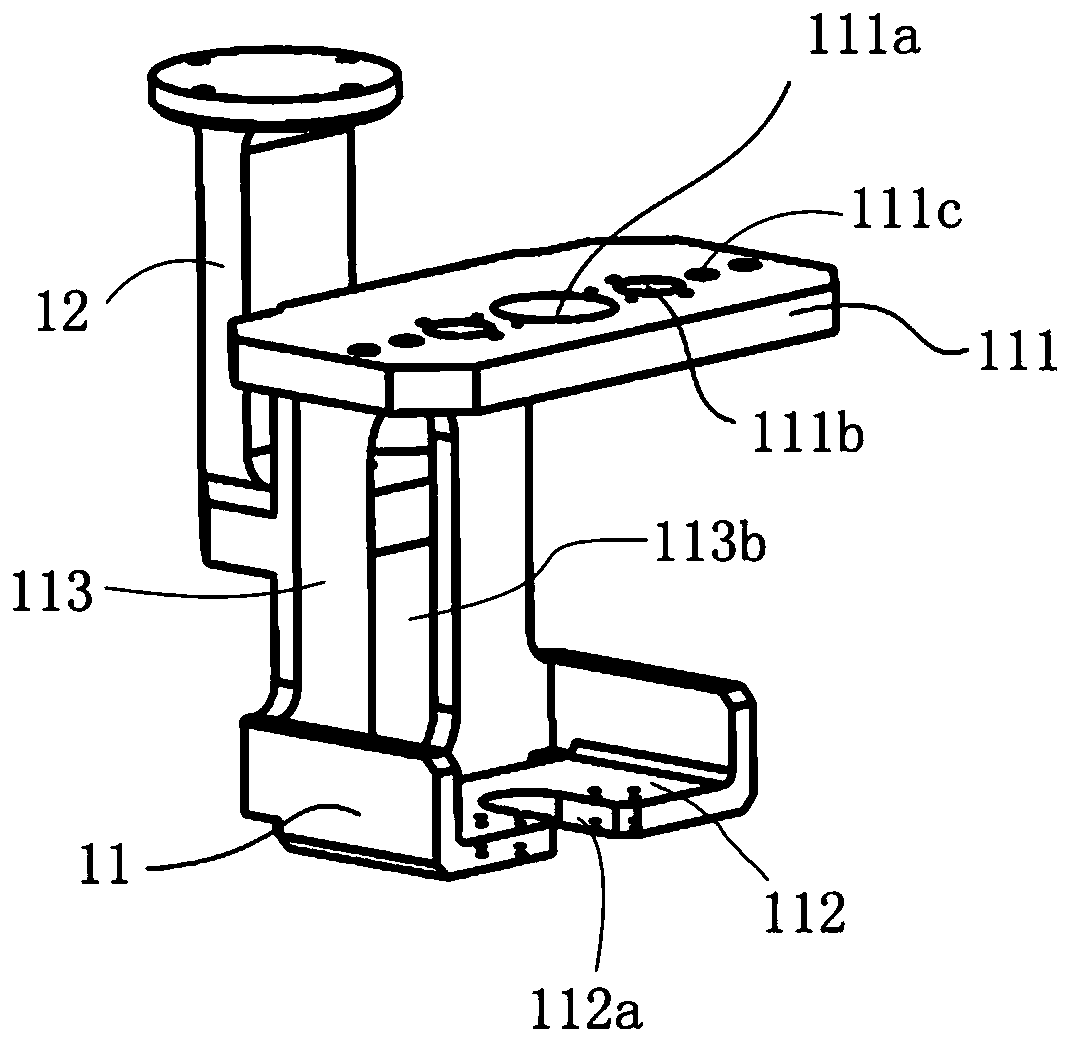
[0040] Such as image 3As shown, the fixing module 1 includes a fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More