Seven-degree-of-freedom space manipulator ground microgravity equivalent experiment device and experiment method
A technology of space manipulators and experimental devices, which is applied in the direction of measuring devices, testing of machines/structural components, instruments, etc., can solve problems such as low sensitivity, less degrees of freedom, and long arms, and achieve guaranteed results, safety and reliability, The effect of improving safety and reliability and reducing precision requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
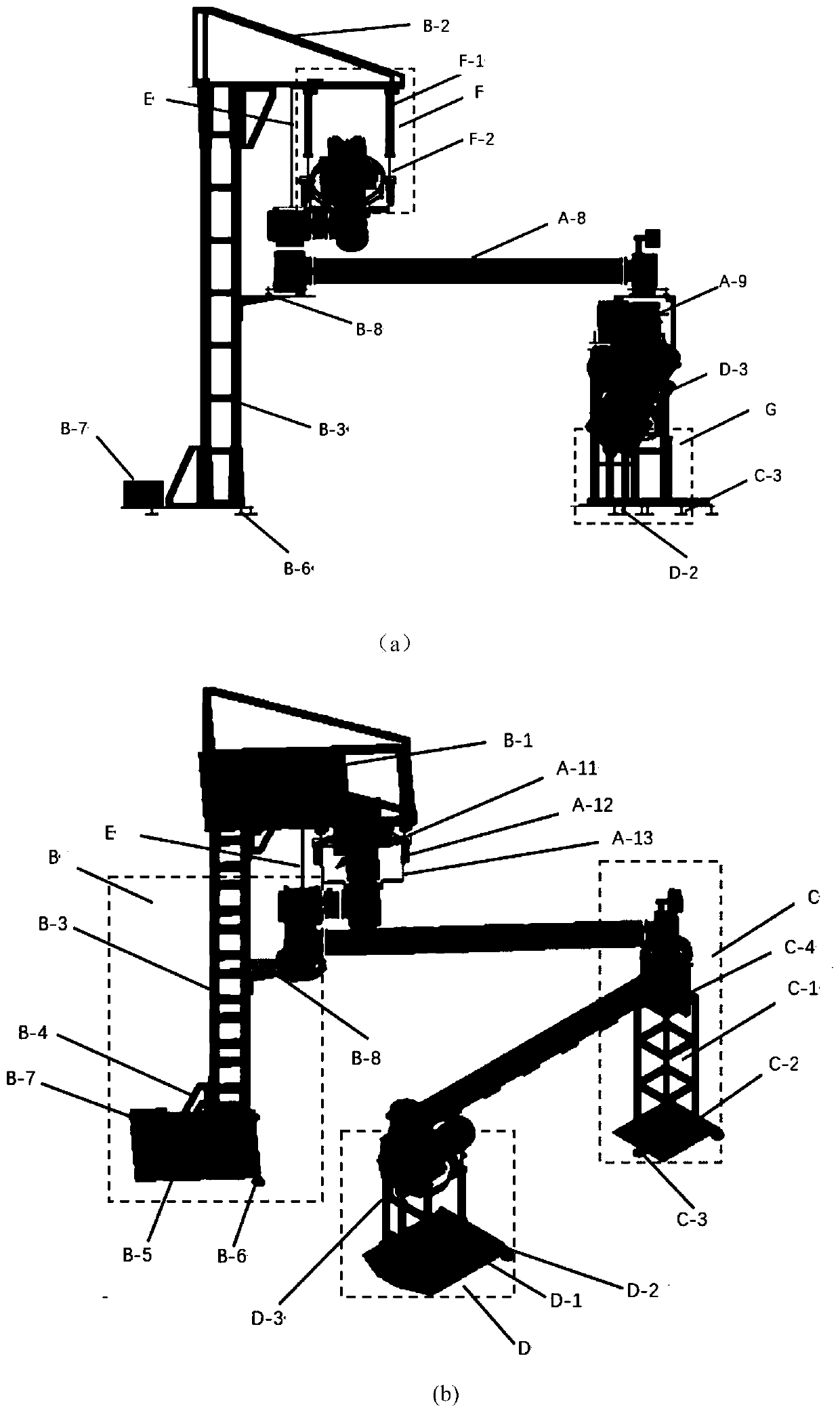
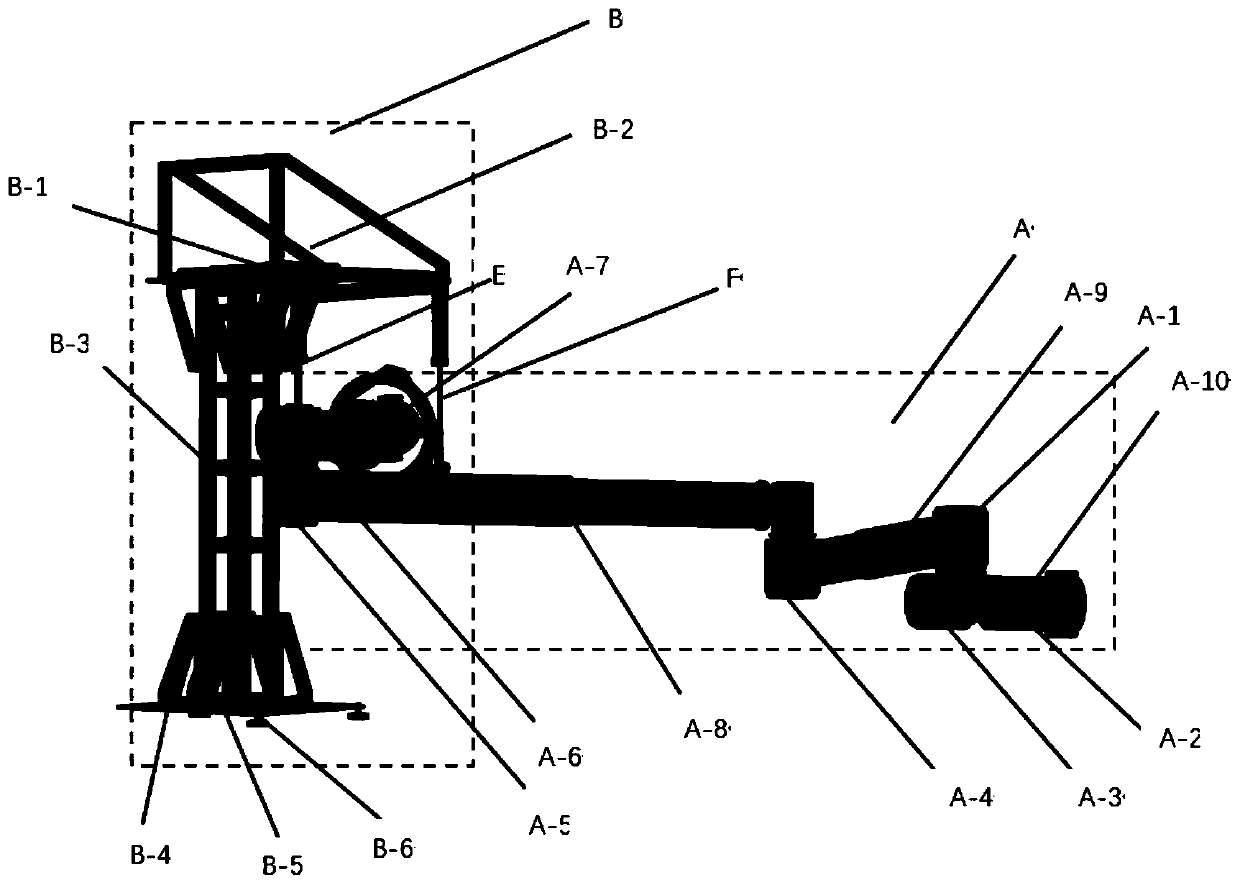
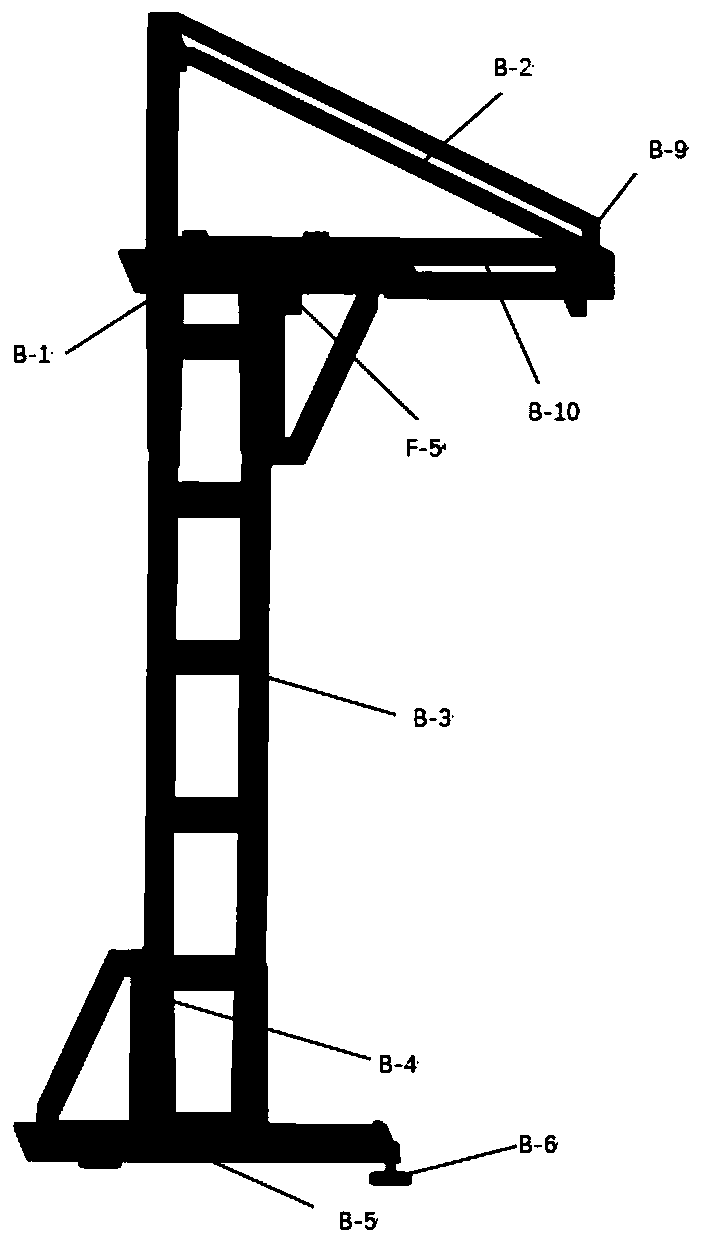
[0053] Such as figure 1 , 2 , 3, and 4, the seven-degree-of-freedom space manipulator ground microgravity equivalent experimental device disclosed in this embodiment includes the air foot device B of the shoulder suspension support frame, the air foot device C of the elbow support, and the wrist suspension Support bracket air foot device D, seven-degree-of-freedom mechanical arm A, joint suspension shaft device E, cylinder device F, and cylinder device G.
[0054] The seven-degree-of-freedom robotic arm includes two arms, the first arm A-8 and the second arm A-9, the shoulder revolving joint A-5, the shoulder revolving joint A-6, and the shoulder revolving joint A-7. There are three revolving joints, including elbow revolving joint A-4, wrist revolving joint A-1, wrist revolving joint A-2, and wrist revolving joint A-3. Shoulder revolving joint A-5, shoulder revolving joint A-6, shoulder revolving joint A-7 constitute the shoulder structure; wrist revolving joint A-1, wrist ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com