

Electrostatic adsorption wall-climbing robot foot structure based on variable stiffness material regulation and control
A wall-climbing robot and electrostatic adsorption technology, applied in the field of robotics, can solve problems such as high power consumption, poor adaptability, and weak adsorption performance, and achieve the effects of reducing weight, increasing rigidity, and improving adsorption performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The specific embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
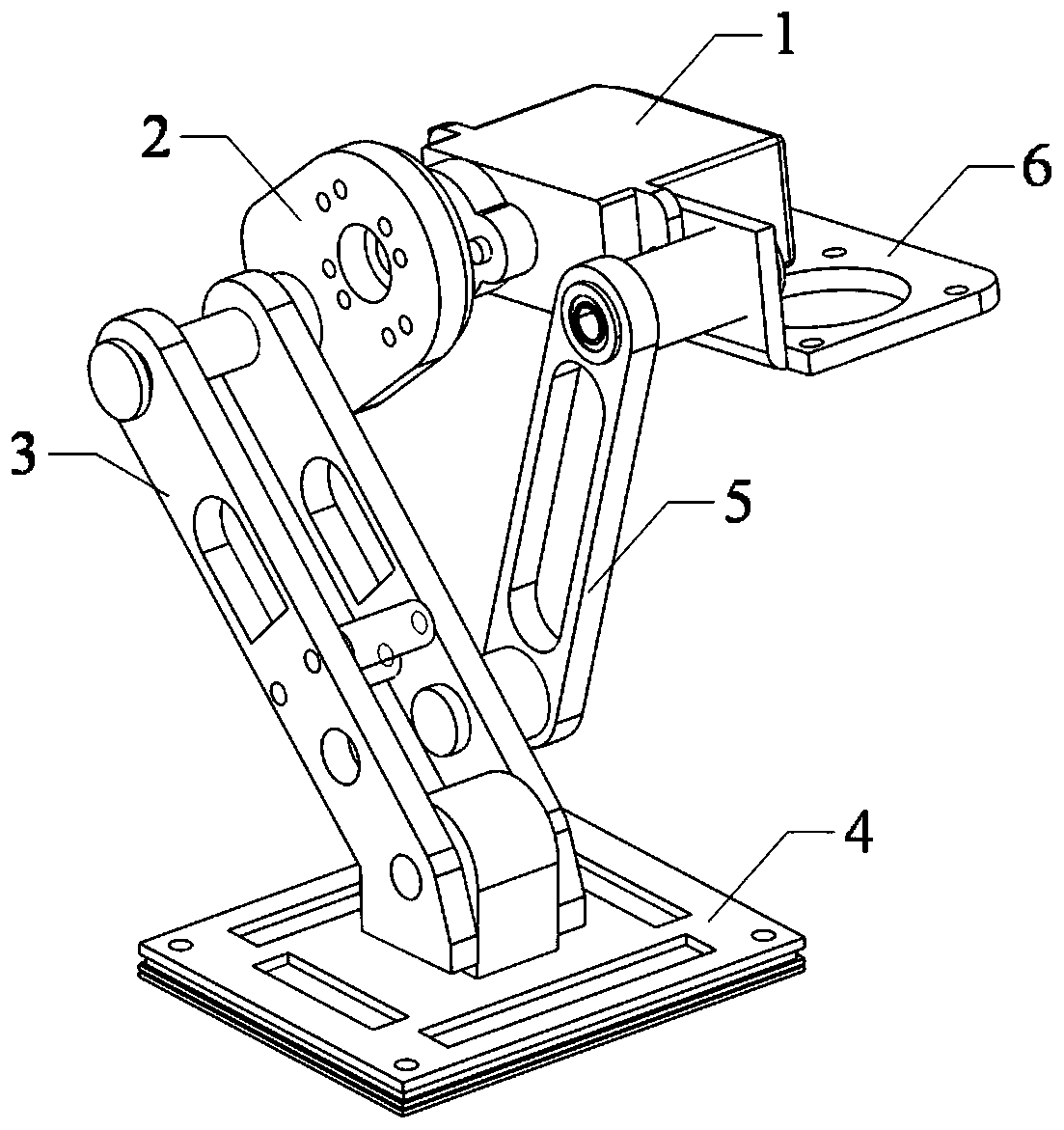
[0033] Such as Figure 1-2 As shown, the foot structure of an electrostatic adsorption wall-climbing robot based on variable stiffness material regulation provided by the present invention includes a transmission device and a sole 4; the transmission device is a crank rocker mechanism, and the steering gear 1 is fixed on the steering rack 6 drives the crank 2 to rotate, the crank 2 is connected with the connecting rod 3, and the connecting rod 3 is limited by the rocker 5, so that the sole 4 maintains a certain movement track; the crank-rocker mechanism is designed to reduce material within the allowable range of strength.
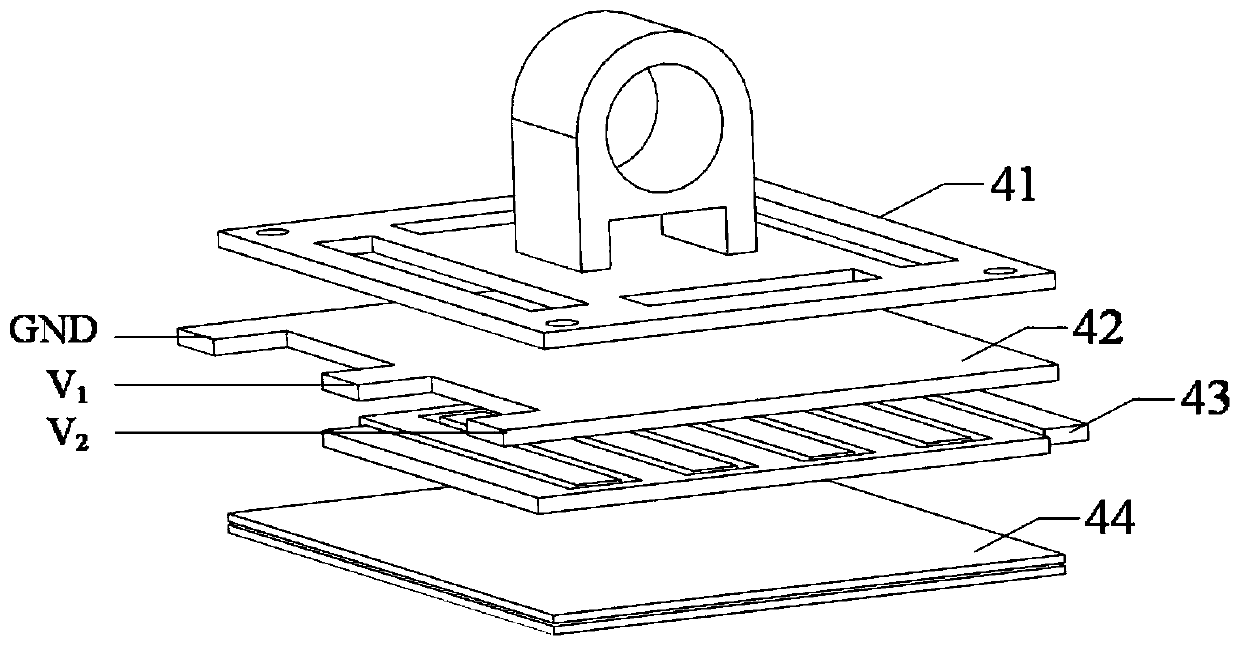
[0034] The bottom of the foot 4 is connected to the connecting rod 3 through the connecting layer 41. The tail of the connecting rod 3 is designed as a plane, and a certain distance is reserved between the plan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More