

Rehabilitation weight-reducing walking training vehicle capable of realizing linear following by detecting distance and control method
A technology for weight loss walking training and distance detection, which is applied in the field of medical devices to achieve the effect of short data transmission time, low probability of interference, and guaranteed accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
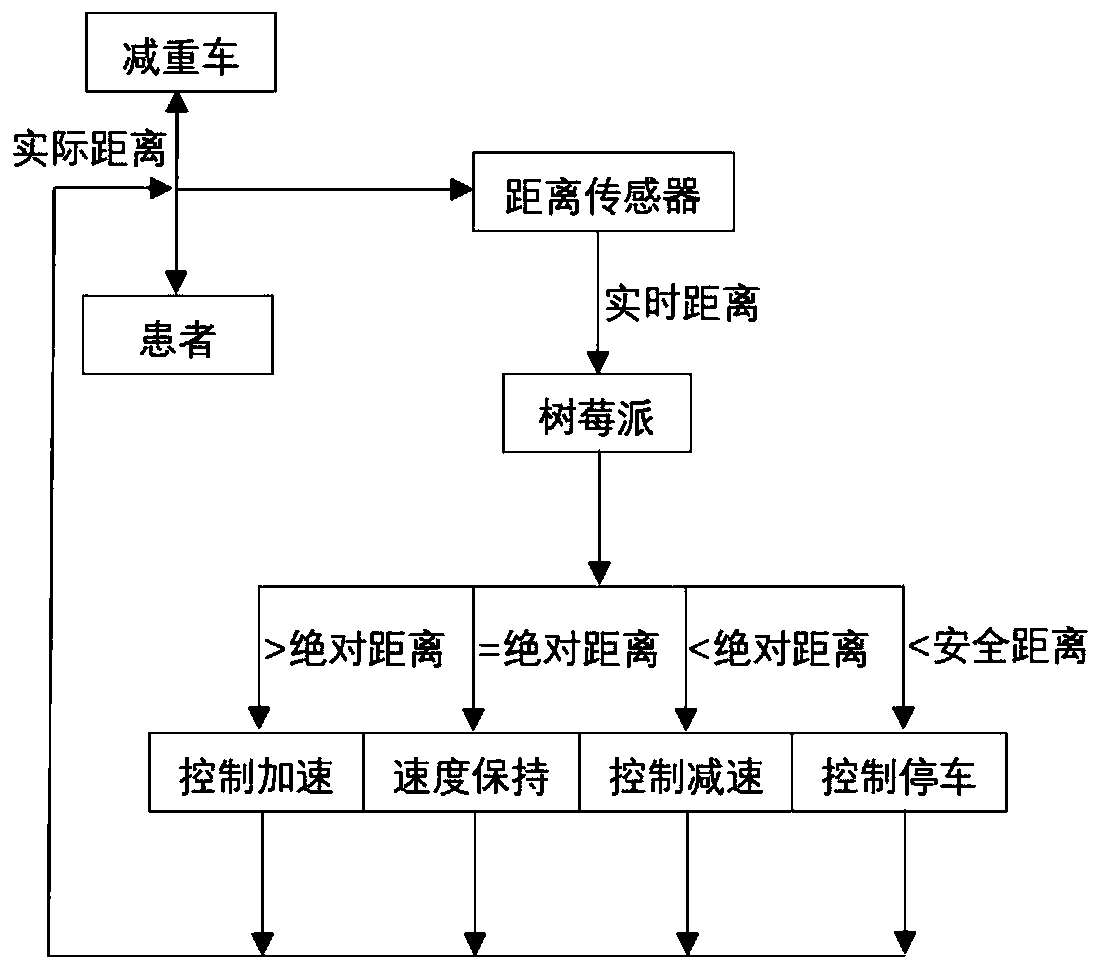
[0073] 1. The control system uses Raspberry Pi as the controller and a TFmini laser ranging sensor as the distance sensor;
[0074] 2. Set the Raspberry Pi communication cycle to 10ms, that is, get the measurement value of the distance sensor every 10ms;
[0075] 3. When the patient puts on the protective clothing (that is, the weight reduction sling) completes the preparatory action and starts the follow mode switch, the Raspberry Pi saves the current distance (the lateral distance between the distance sensor and the patient's back) as the absolute distance between the weight loss vehicle and the patient ;
[0076] 4. When the patient moves forward, the distance between the sensor and the back increases due to the forward movement of the back;
[0077] 5. The controller receives the real-time distance value at the current time and compares the real-time distance value with the absolute distance value to obtain the distance difference, and obtains the training vehicle speed correction...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More