

An anti-interference and anti-swing method for underactuated overhead traveling cranes based on system passivity
An overhead crane, underactuated technology, applied in the direction of load hanging components, transportation and packaging, can solve the problems of complex dynamic model, large size and high underactuating degree of crane system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The following are specific embodiments of the present invention and in conjunction with the accompanying drawings, the technical solutions of the present invention are further described, but the present invention is not limited to these embodiments.
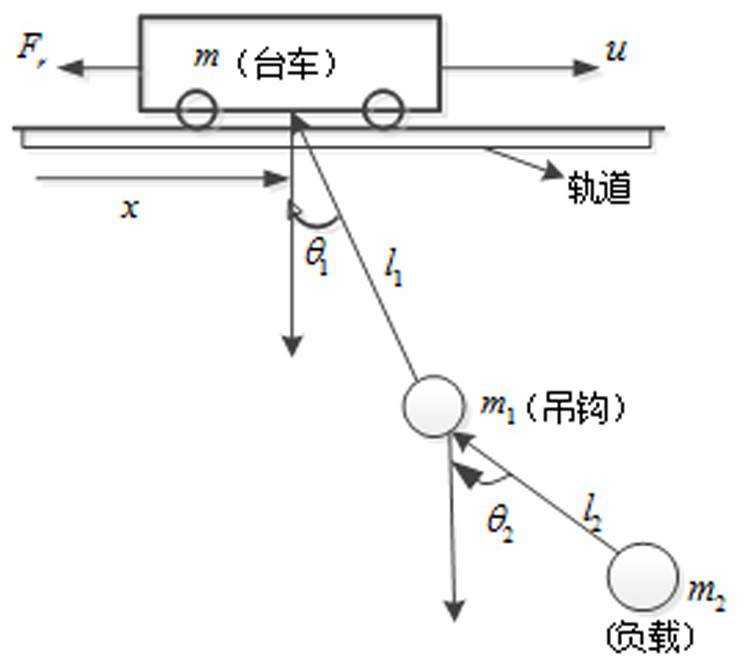
[0023] see figure 1 with figure 2 , the anti-interference and anti-swing method of underactuated overhead traveling crane based on system passivity in this embodiment includes the following steps:
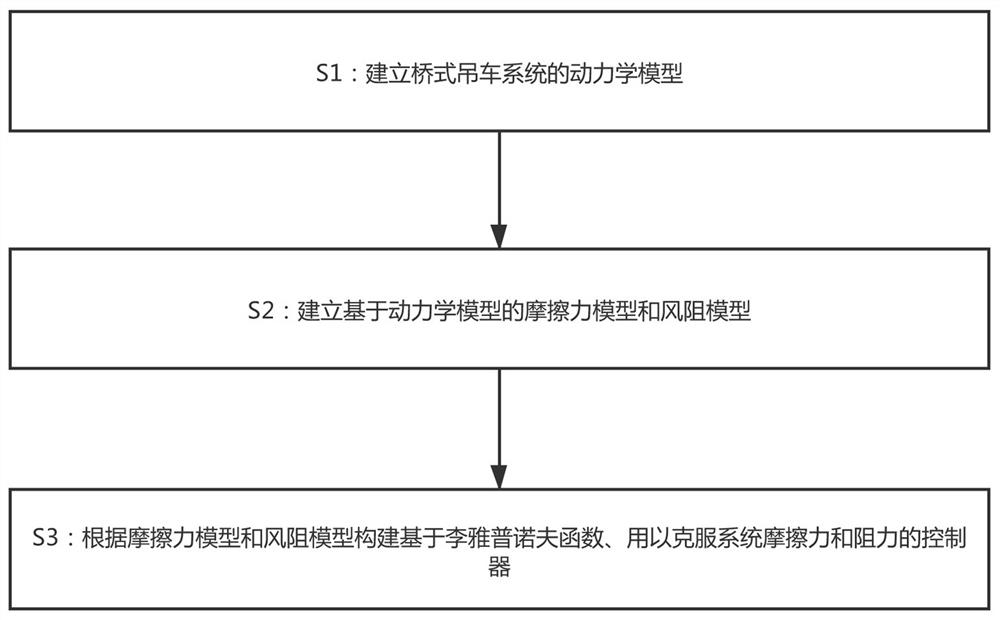
[0024] S1: Establish the dynamic model of the overhead crane system;
[0025] S2: Establish a friction model and a wind resistance model based on the dynamic model;
[0026] S3: Construct a controller based on the Lyapunov function to overcome the friction and resistance of the system according to the friction model and the wind resistance model.
[0027] Here, the dynamic model of the two-stage pendulum system of the overhead crane is first established, and the friction model and wind resistance model of the system are est...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More