Direct drive type humanoid biped robot
A bipedal robot, direct drive technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of increasing the weight of the mechanism and the difficulty of control, complex structure of the robot, difficult to control, etc., to achieve light weight, simple and convenient control, and easy Processing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the technical means, creative features, goals and effects of the present invention easy to understand, the present invention will be further elaborated below in conjunction with specific illustrations. In the description of the present invention, it should be noted that unless otherwise specified and Limitation, the terms "installation", "connection" and "connection" should be understood in a broad sense, for example, it can be a fixed connection, it can also be a detachable connection, or an integral connection can be a mechanical connection or an electrical connection; it can be It can be directly connected, or indirectly connected through an intermediary, and can be connected internally between two components.
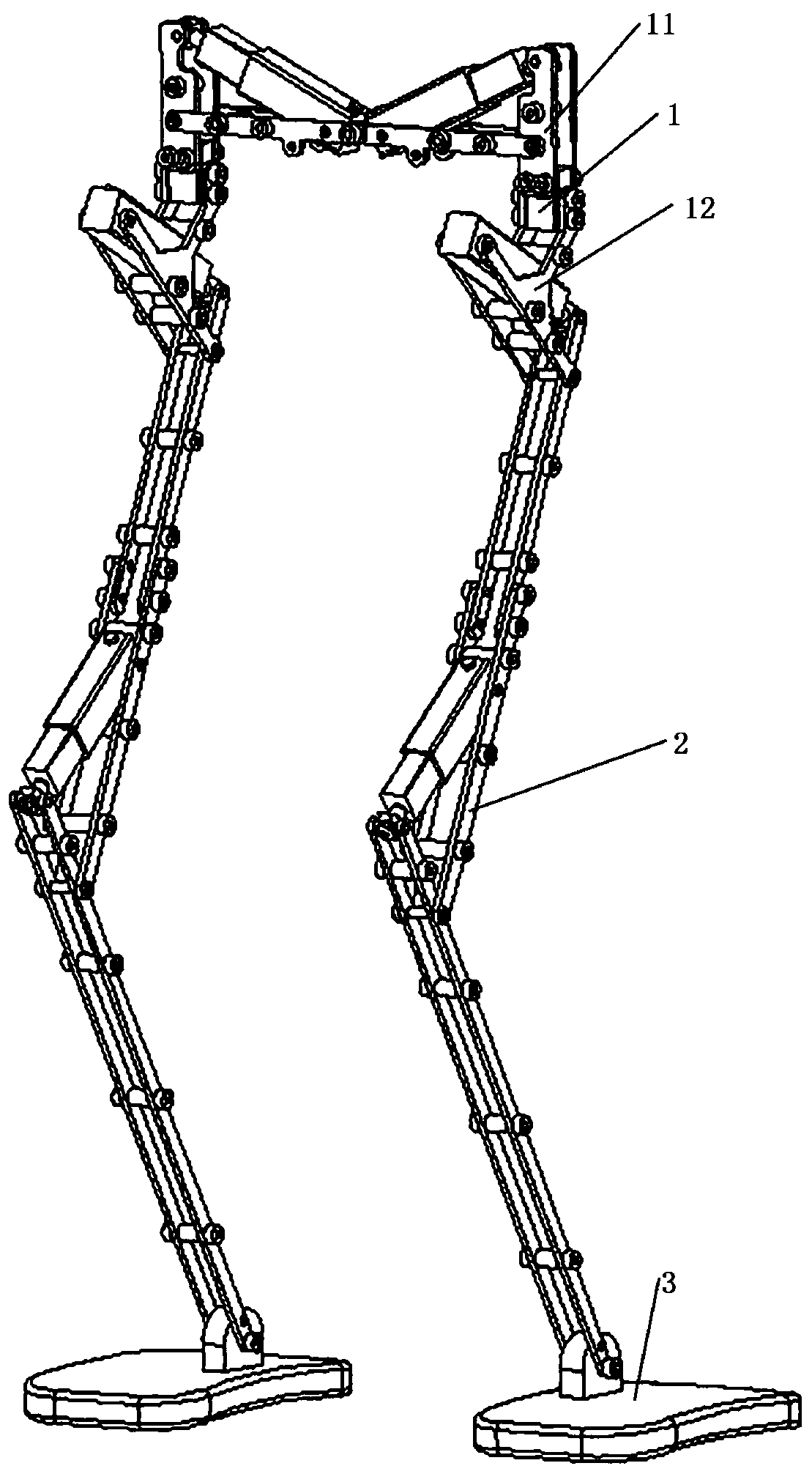
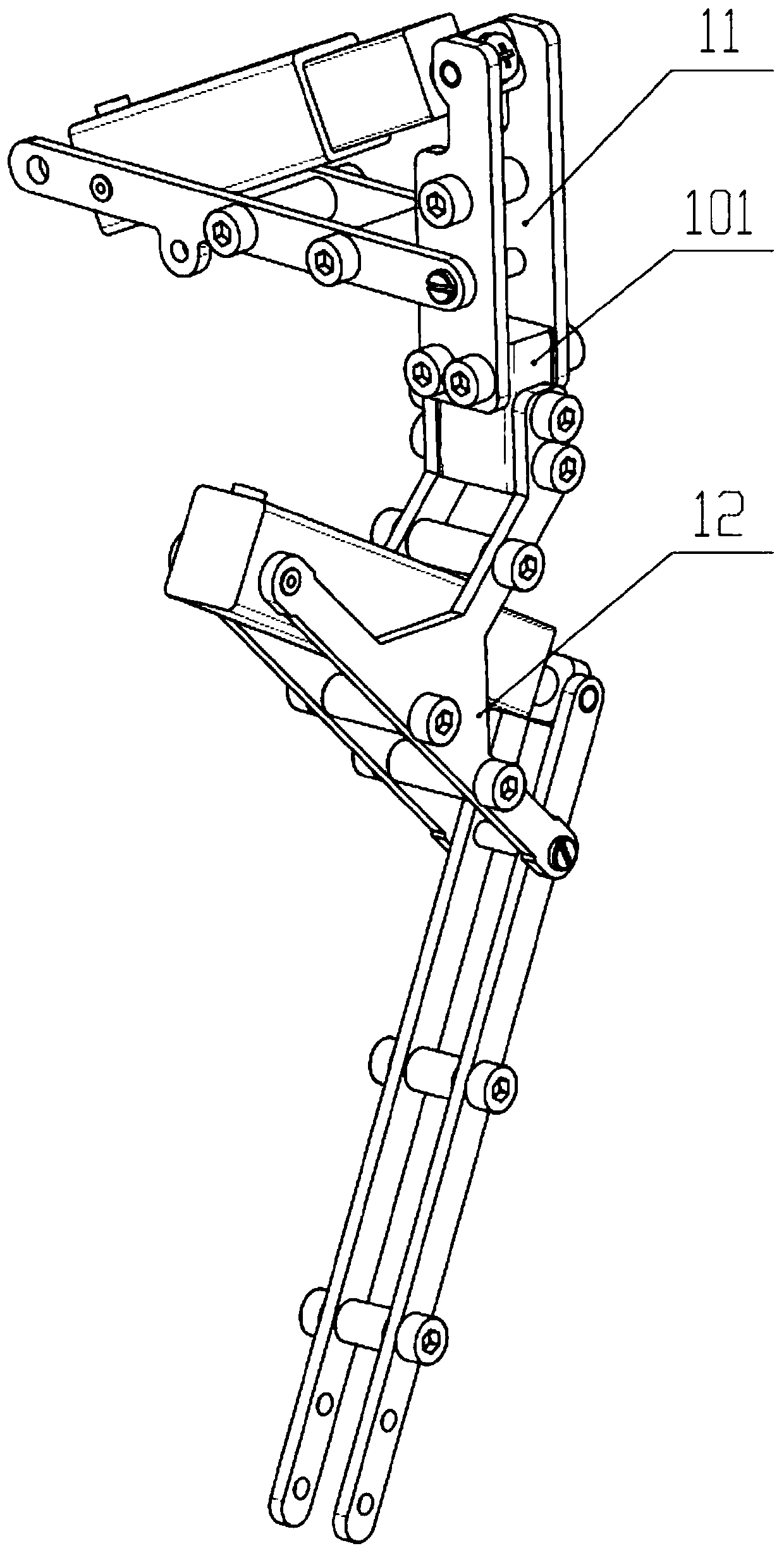
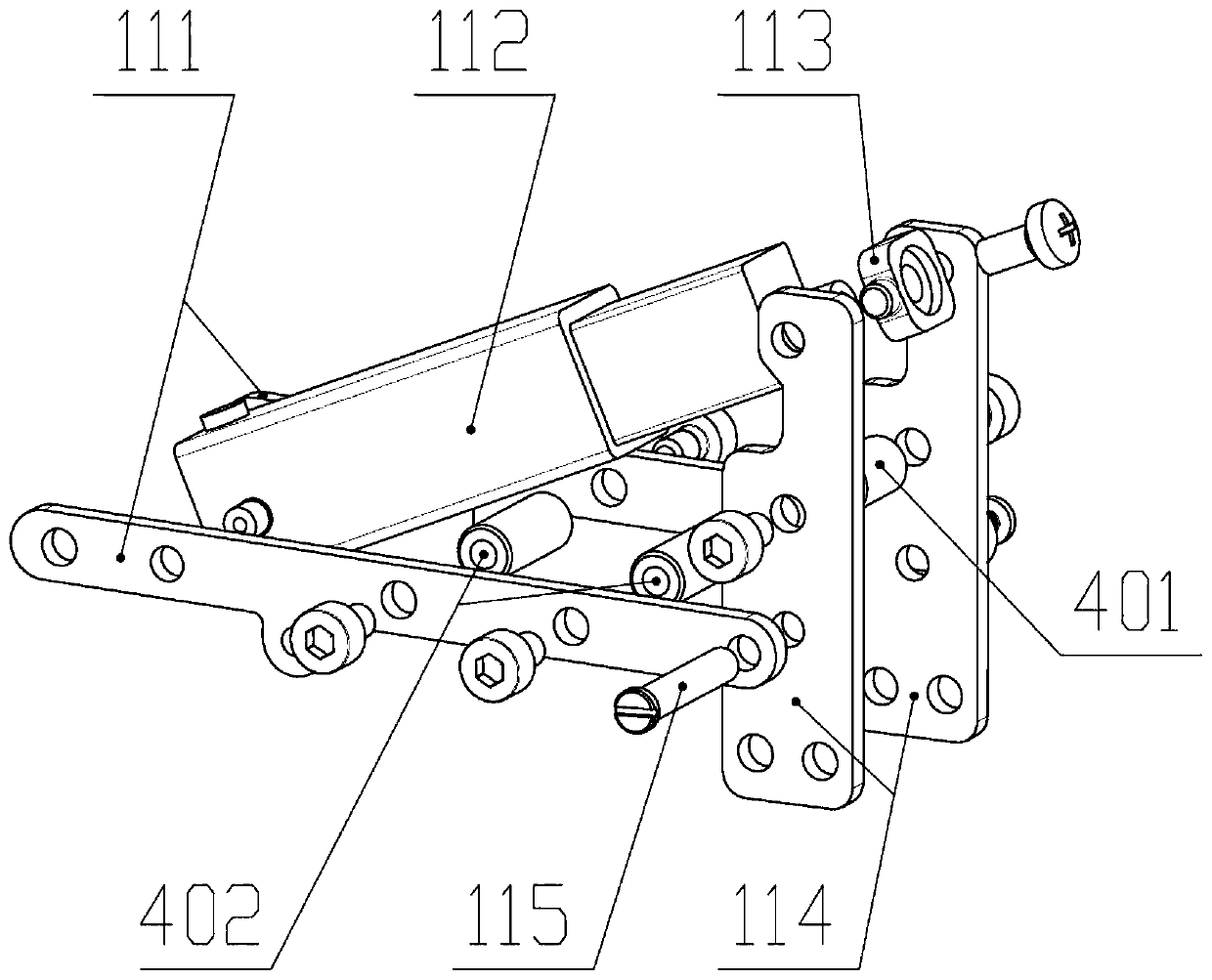
[0026] Such as Figure 1-6 As shown, a direct-drive humanoid biped robot includes a single-leg structure, and the single-leg structure is two groups of symmetrical single-leg structures, and the single-leg structure includes a two-degree-of-f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More