

Cooperative control system and method based on unmanned surface vehicle and multiple underwater robots
An underwater robot, collaborative control technology, applied in three-dimensional position/channel control, autonomous decision-making process, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
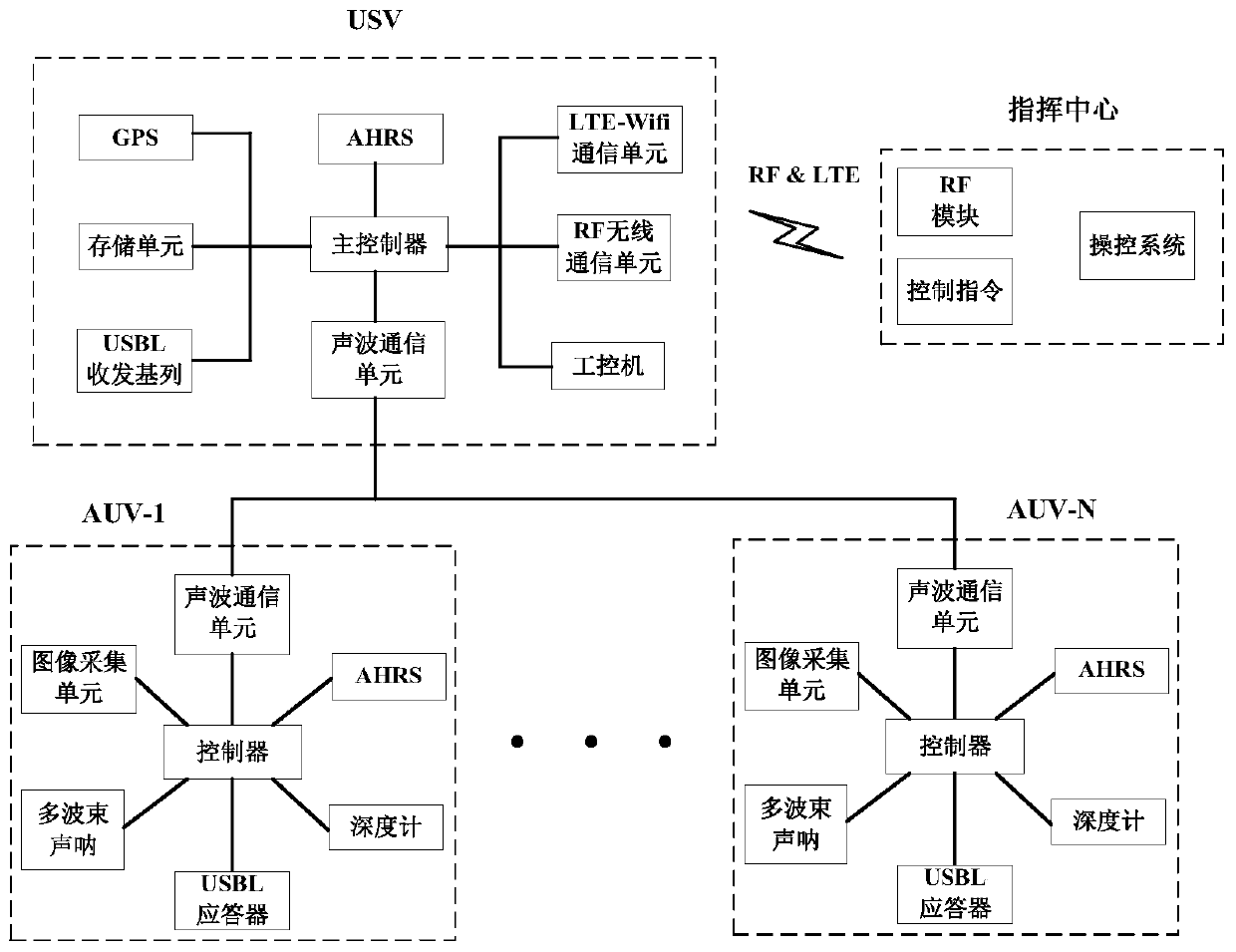
[0114] An embodiment of the present invention provides a cooperative control system based on unmanned boats and multiple underwater robots, such as figure 1 shown, including an unmanned vehicle and multiple robots;
[0115] The unmanned boat dynamically generates underwater survey and search targets and path planning information corresponding to each robot based on the obtained geographic locations of all underwater survey and search targets, underwater terrain information, and real-time geographic locations of all robots;
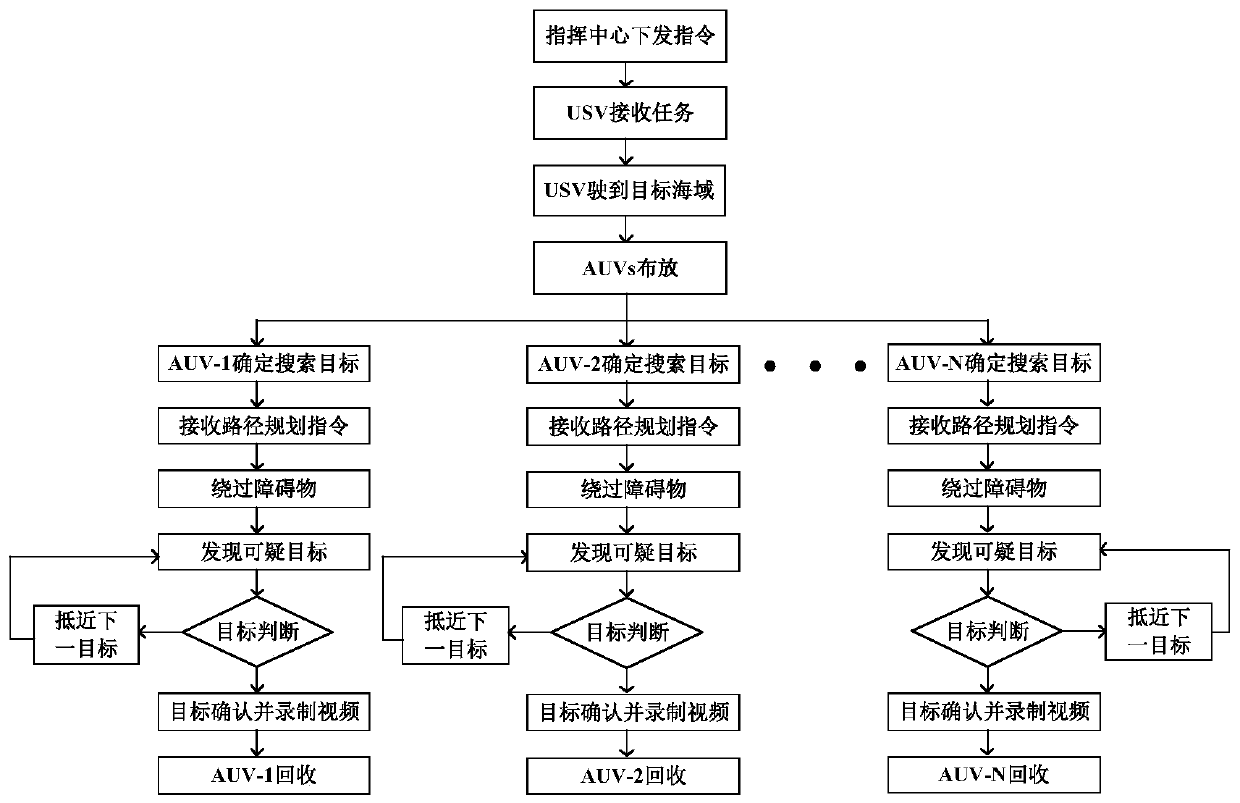
[0116] Each robot receives the underwater survey search target and path planning information sent by the unmanned boat, and performs target search according to the path planning information. When encountering obstacles, it bypasses obstacles according to the path planning information; During the target reconnaissance process, when arriving near an underwater suspicious target, collect the image information of the underwater suspicious target and compare an...
Embodiment 2
[0179] Based on the same inventive concept as in Embodiment 1, an embodiment of the present invention provides a cooperative control method based on an unmanned vehicle and multiple underwater robots, including:
[0180] Utilize the unmanned vehicle to dynamically generate underwater survey and search targets and path planning information corresponding to each robot based on the obtained geographic locations of all underwater survey and search targets, underwater terrain information, and real-time geographic locations of all robots;
[0181] Utilize each robot to receive the underwater survey search target and path planning information sent by the unmanned boat, perform target search according to the path planning information, and when encountering an obstacle, bypass the obstacle according to the path planning information; During the search target survey process, when it reaches a certain underwater suspicious target, collect the image information of the underwater suspicious ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More