Vehicle-mounted manipulator one-key grabbing and putting-back control method, device and system
A control method and technology of manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the risk of falling objects to be grasped, limitations of path planning, etc., so as to improve the success rate of grasping, ensure safety, and ensure safety effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
[0051] In the embodiments of the present invention, the term "comprising", "comprising" or any other variation thereof is intended to cover a non-exclusive inclusion such that a process, method, commodity or apparatus comprising a series of elements includes not only those elements, but also Include other elements not expressly listed, or also include elements inherent in such process, method, commodity or apparatus. Without further limitations, an element defined by the phrase "comprising a ..." does not preclude the presence of additional identical elements in the process, method, article, or apparatus that includes the element.
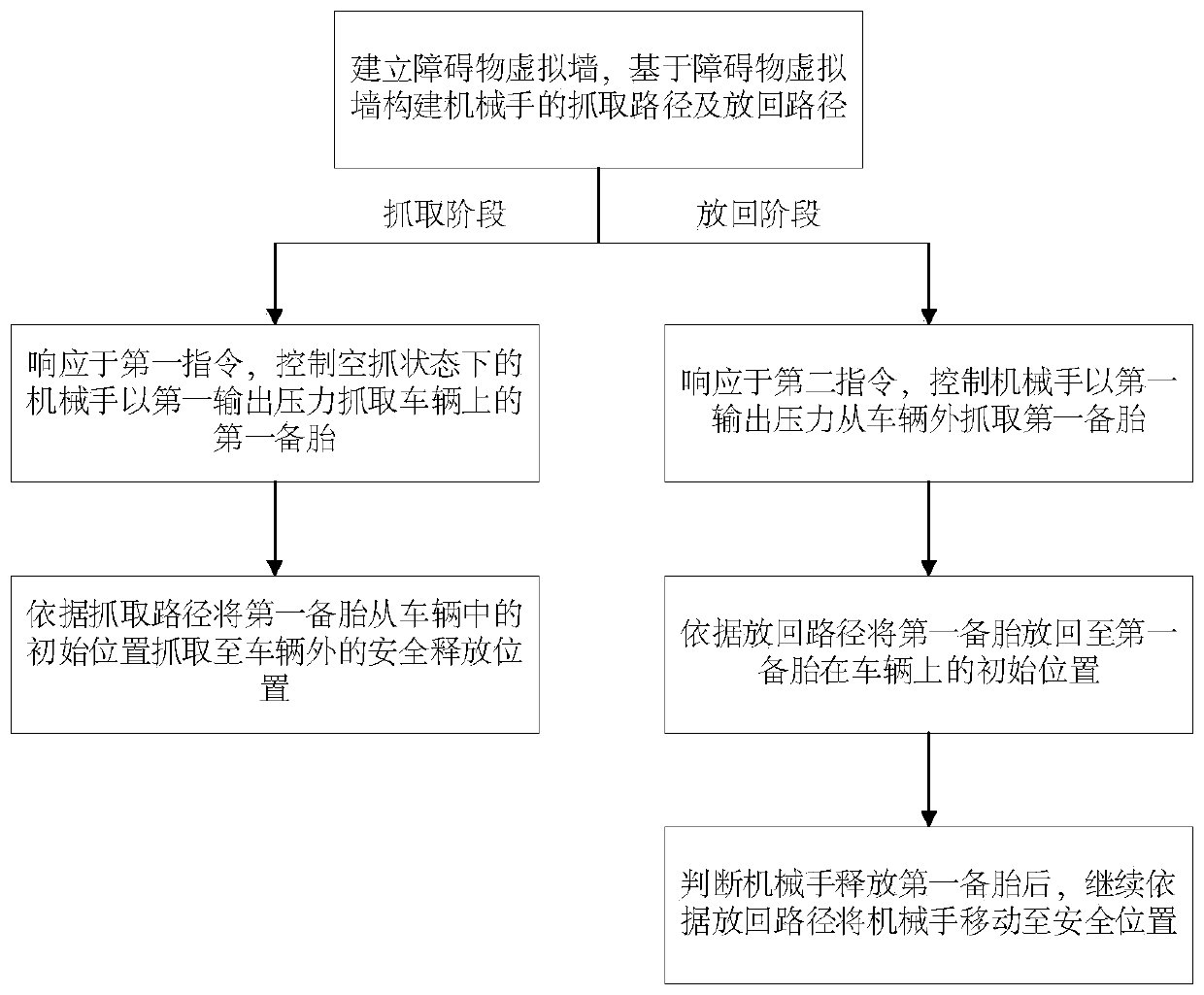
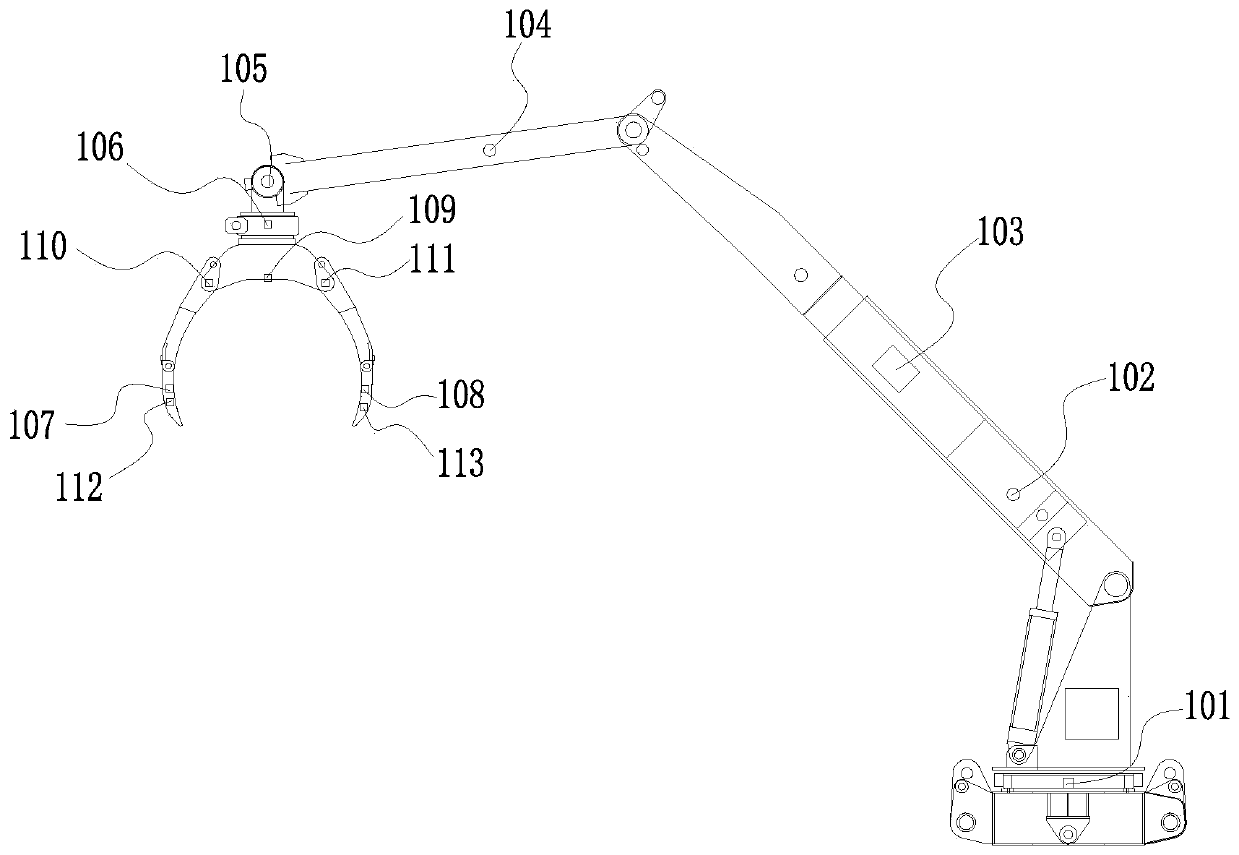
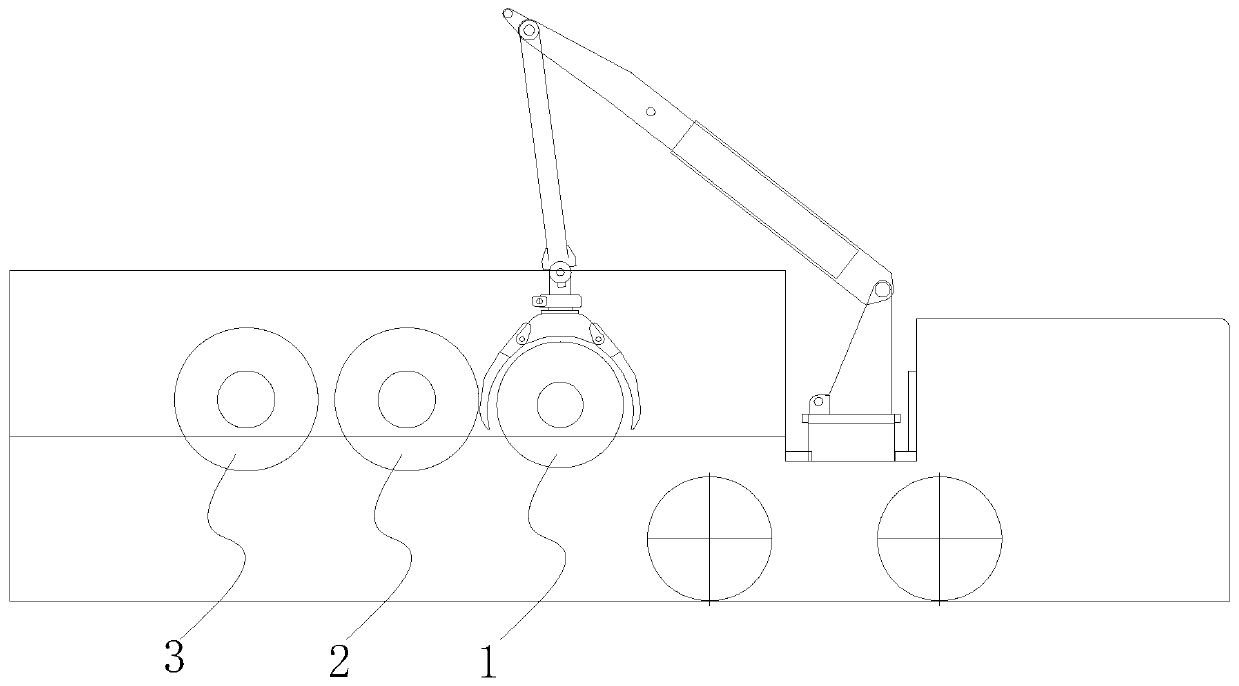
[0052] Such as figure 1 As ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com