

Automatic driving target detection system and method based on deep learning and binocular camera shooting
A target detection and automatic driving technology, applied in the direction of instruments, biological neural network models, character and pattern recognition, etc., can solve problems such as large viewing angle blind spots, incompetence, and system failure, so as to reduce the range of visual blind spots and increase detection accuracy Sexuality, wide field of view effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
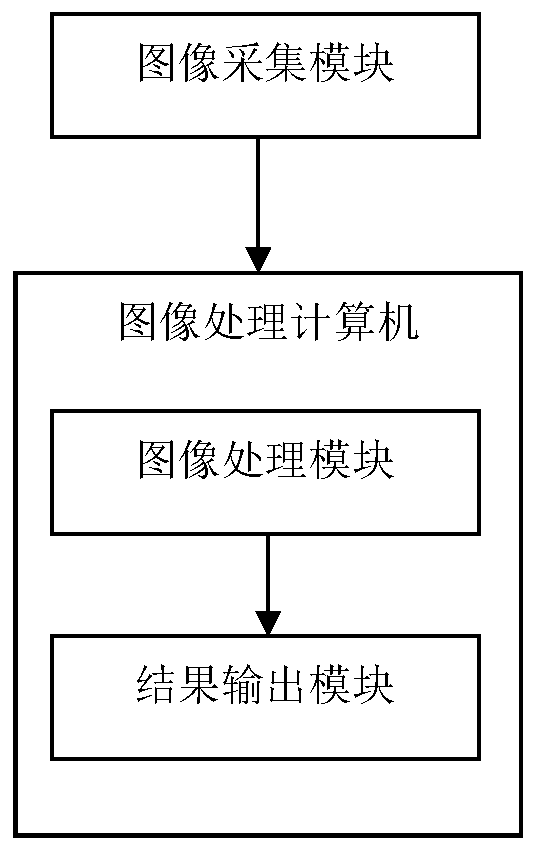
[0027] refer to figure 1 , an automatic driving target detection system based on deep learning and binocular photography, including an image acquisition module, an image processing module, and a result output module, wherein the image acquisition module is fixed behind the front windshield of the test vehicle, and the image processing module and result output The module is located in the image processing computer.
[0028]The image acquisition module uses a binocular camera for image acquisition, which has the characteristics of high definition and high frame rate. It can acquire images in a wide range of shooting directions through the cameras on the left and right sides, and can capture point cloud images representing distances, so as to obtain rich driving information on the road ahead. The binocular camera is a vehicle-mounted c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More