

Calibration method and device for single-line laser radar and multi-line laser radar
A single-line laser radar and multi-line laser technology, applied in the field of data processing, can solve the problems of no solution and large calibration result error, and achieve the effect of improving the accuracy and solving the large error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0033] According to an embodiment of the present invention, an embodiment of a calibration method for a single-line laser radar and a multi-line laser radar is provided. computer system, and although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
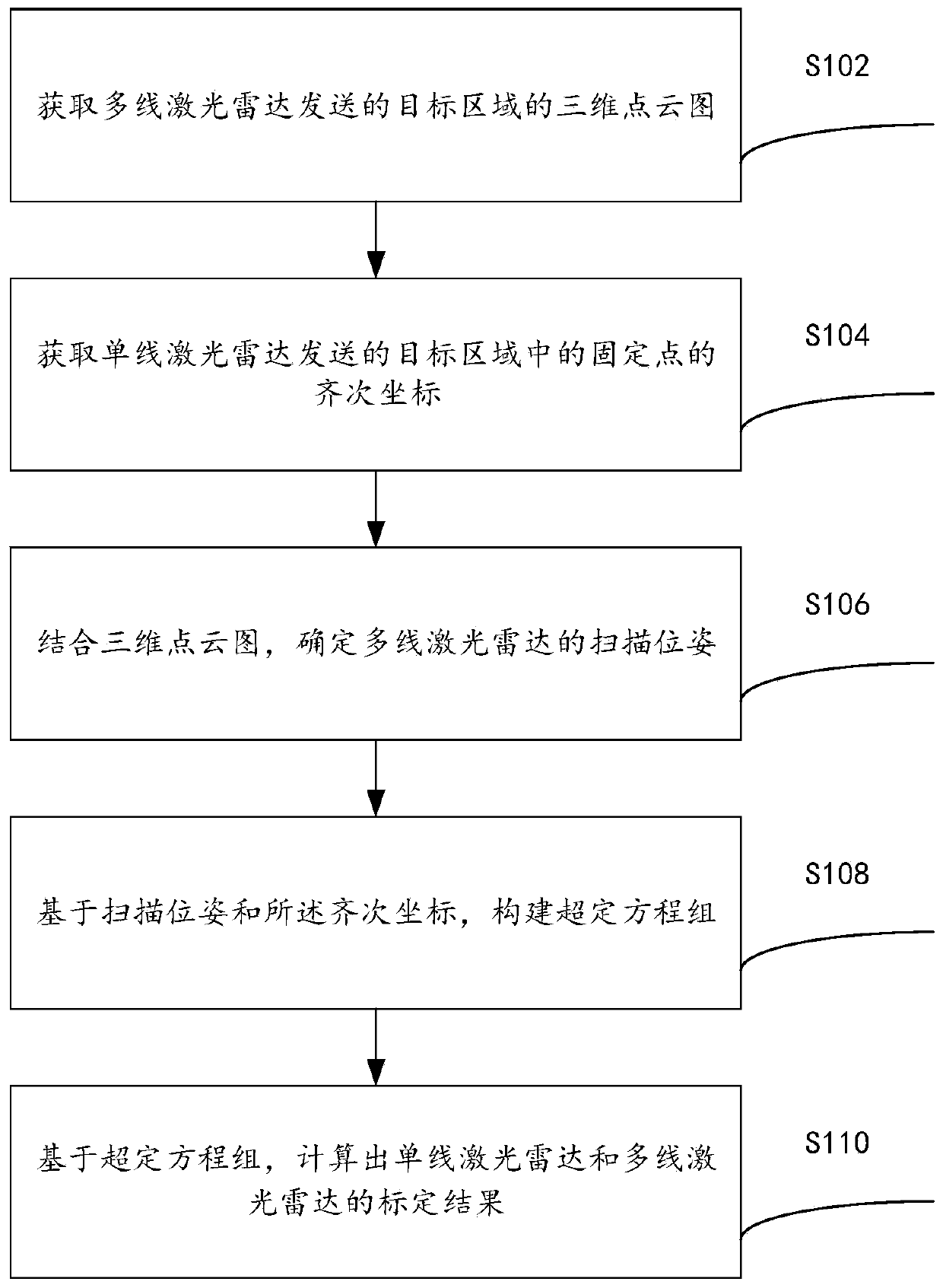
[0034] figure 1 It is a flowchart of a calibration method for a single-line laser radar and a multi-line laser radar according to an embodiment of the present invention, as shown in figure 1 As shown, the method includes the following steps:
[0035] Step S102, obtaining a three-dimensional point cloud image of the target area sent by the multi-line lidar;
[0036] Specifically, the above-mentioned three-dimensional point cloud map can be established through a multi-line lidar slam algorithm.
[0037] Step S104, acquiring homogeneous coordinates of a fixed point in the target area sent by a single-line lidar, wherei...
Embodiment 2
[0068]The present invention also provides an embodiment of a single-line laser radar and multi-line laser radar calibration device, which is used to implement the single-line laser radar and multi-line laser radar calibration method provided by the above content of the embodiment of the present invention, as follows The specific introduction of the calibration device for single-line laser radar and multi-line laser radar provided by the embodiment of the present invention.
[0069] like Figure 4 As shown, the above-mentioned calibration device for single-line lidar and multi-line lidar includes: a first acquisition unit 10 , a second acquisition unit 20 , a determination unit 30 , a construction unit 40 and a calculation unit 50 .
[0070] The first acquisition unit 10 is configured to acquire a three-dimensional point cloud image of the target area sent by the multi-line lidar;
[0071] The second acquiring unit 20 acquires the homogeneous coordinates of the fixed points in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More