

Artificial intelligence automatic obstacle avoidance walking chassis
A technology of automatic obstacle avoidance and walking chassis, which is applied in the direction of non-electric variable control, substructure, elastic suspension, etc., and can solve the problems of large volume, large mass, inconvenience, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
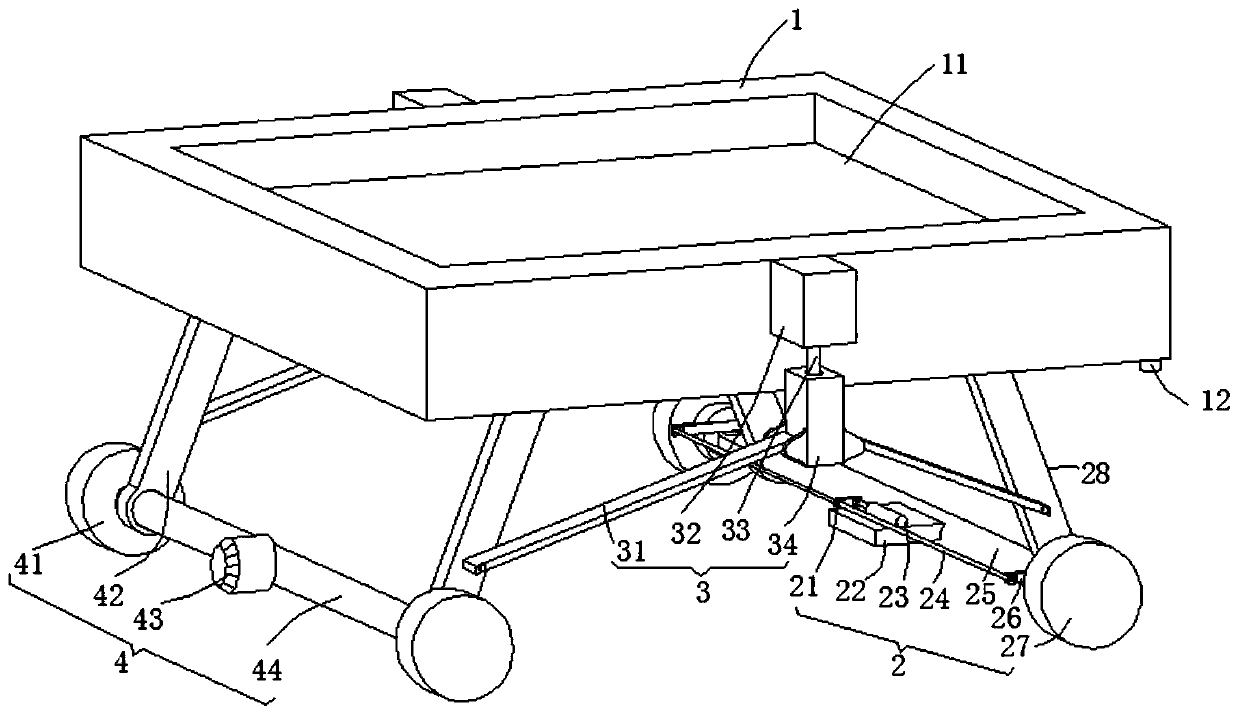
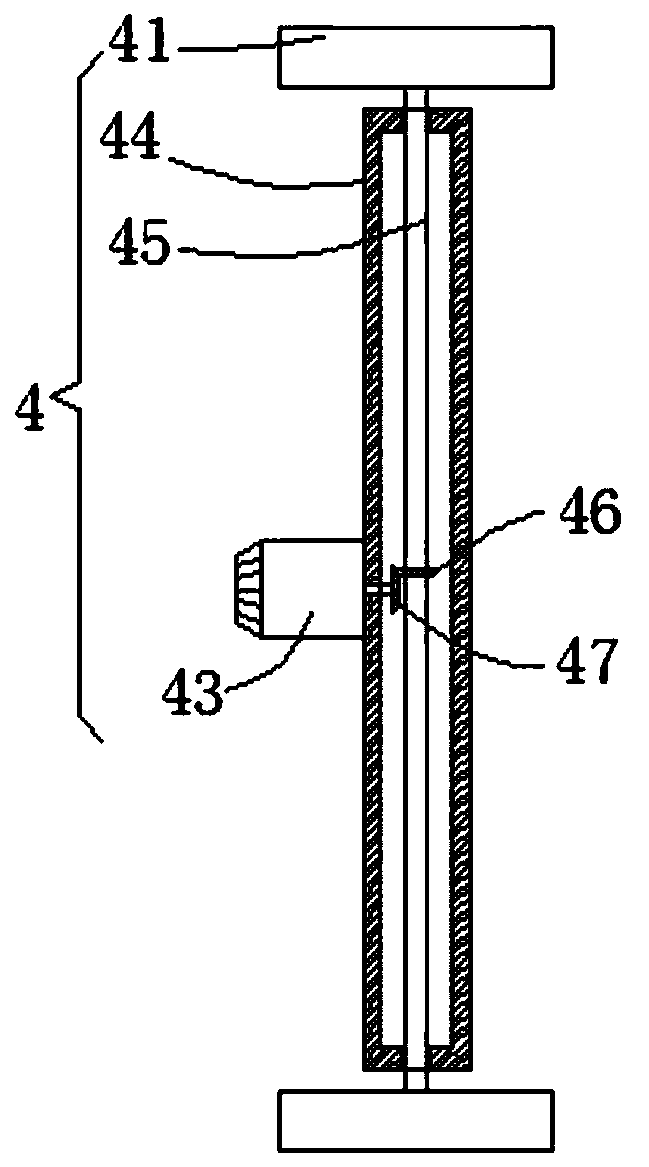
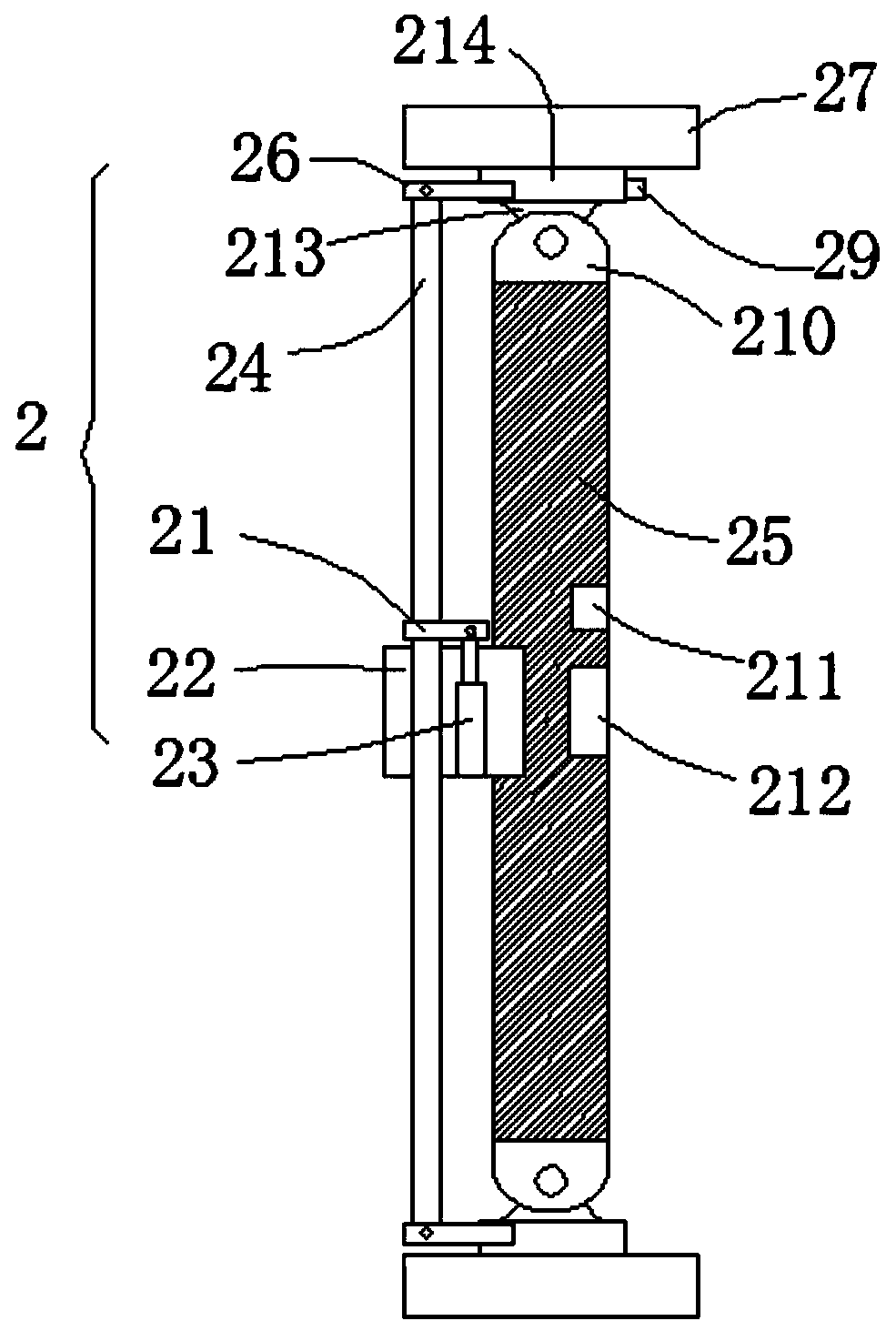
[0030] see Figure 1-5 , this embodiment provides an artificial intelligence automatic obstacle avoidance walking chassis, including a chassis 1, a data processing module 5, a driving mechanism 4, a steering mechanism 2 and two adjustment mechanisms 3, and the driving mechanism 4 includes two first hinged rods 42. The first rotating sleeve 44, the driving motor 43 and the two power wheels 41. The top surfaces of the two first articulated rods 42 of the driving mechanism 4 are respectively hinged on the front and rear sides of the left end of the bottom surface of the chassis 1. The steering mechanism 2 includes There are two second articulated rods 28, a second rotating sleeve 25, an electric hydraulic cylinder 23, a transmission rod 24 and two steering wheels 27, and the top surfaces of the two second articulated rods 28 of the steering mechanism 2 are respectively hinged on the chassis 1 The two adjustment mechanisms 3 include a servo motor 32, a threaded rod 33, a rectangul...
Embodiment 2
[0036] see Figure 1-5 , made further improvement on the basis of embodiment 1:
[0037] The top surface of the chassis 1 is provided with a rectangular placement groove 11. By opening the rectangular placement groove 11, it is convenient to match the bottom corner side wall of the receiving equipment, so as to facilitate the auxiliary movement of the equipment;
Embodiment 3
[0039] see Figure 1-5 , made further improvement on the basis of embodiment 1:
[0040] Each servo motor 32 is respectively connected with each threaded rod 33 through a power shaft, and each rectangular lifting seat 34 is provided with a threaded hole running through the upper and lower end faces of the rectangular lifting seat 34, and each threaded rod 33 is connected with each rectangular lifting seat through external threads respectively. The threaded hole inner cavity of seat 34 is rotated and plugged in, and the left and right end surface bottoms of each rectangular lifting seat 34 are hinged with the tops of two pull rods 31 respectively, and the tips of two pull rods 31 are respectively connected with the first hinged rod 42 and the second hinged rod. The bottom of the outer wall of 28 is hinged; the bottom end face of the chassis 1 is embedded with a height sensor 12 in the right front face, and the signal output port of the height sensor 12 is connected with the sig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More