Automatic positioning and orientating system for excavation and tunneling of tunnel, subway and mine
A technology of autonomous positioning and orientation system, applied in the field of autonomous positioning and navigation, it can solve the problems of deteriorating azimuth measurement accuracy, unable to support unmanned operation, and measurement error divergence with time, so as to achieve simple and rapid measurement of true north position and realize real-time measurement. and monitoring effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in further detail below through specific examples. The following examples are only descriptive, not restrictive, and cannot limit the protection scope of the present invention.
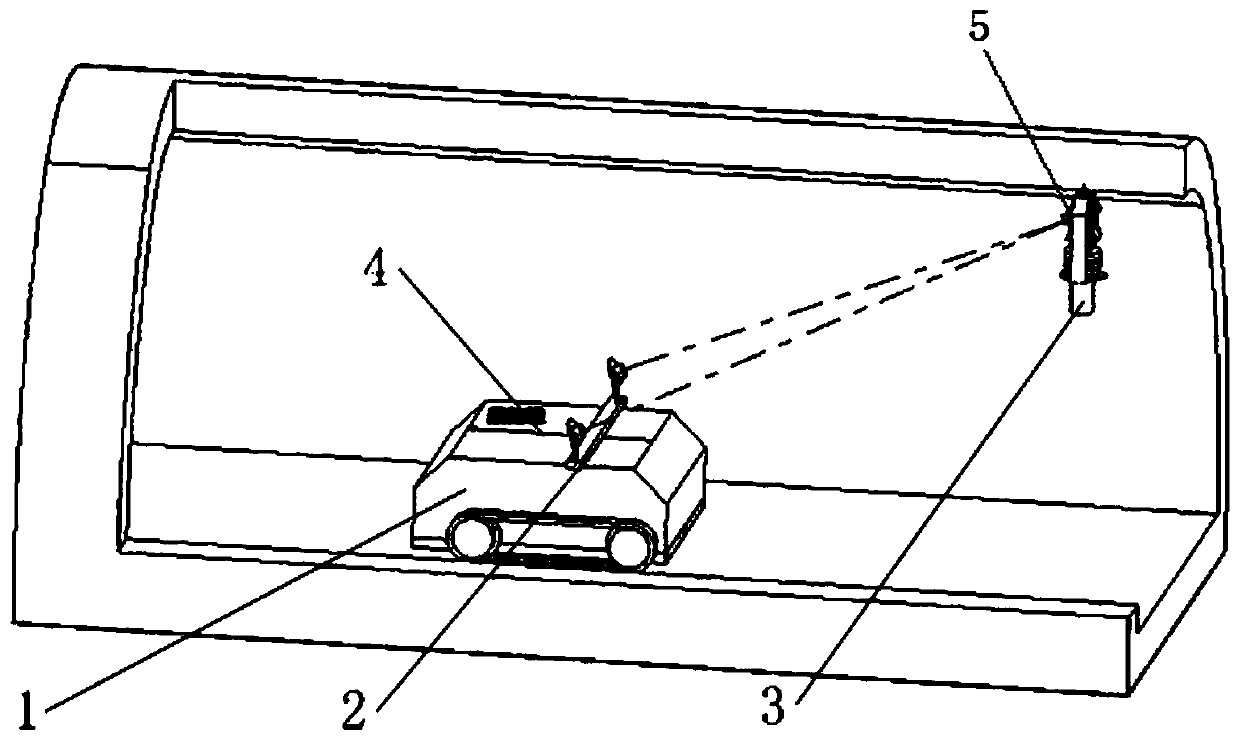
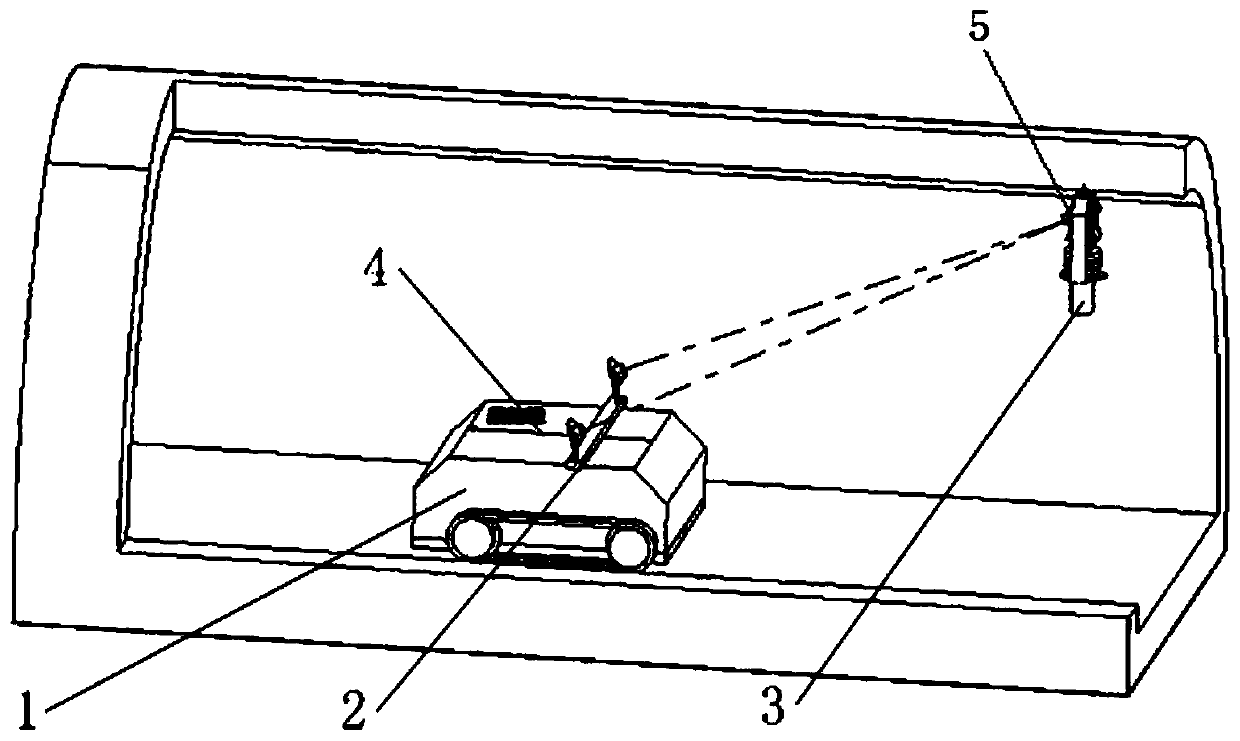
[0024] like figure 1 As shown, an autonomous positioning and orientation system for tunnel, subway and mine excavation includes a gyro total station 3, a dual-target component 2, a control point identification 5 and a wireless communication network. The gyro total station consists of a gyro device and a total station The instrument is composed of the AGT-5 gyro device and the total station instrument group produced by the 707 Research Institute of China Shipbuilding Industry Corporation. It has the functions of autonomous north-finding, ranging, searching for targets, and calculating three-dimensional coordinates. The gyro total station is hung on the top of the roadway, which is firm and stable, and it is several meters to hundreds of meters away from t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com