

Robot joint mapping method and device and computer readable storage medium
A technology for robotics and mapping, applied in the field of robotics, can solve problems such as the inability of mapping to meet demand, and achieve the effect of improving synergy and optimizing the mapping process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
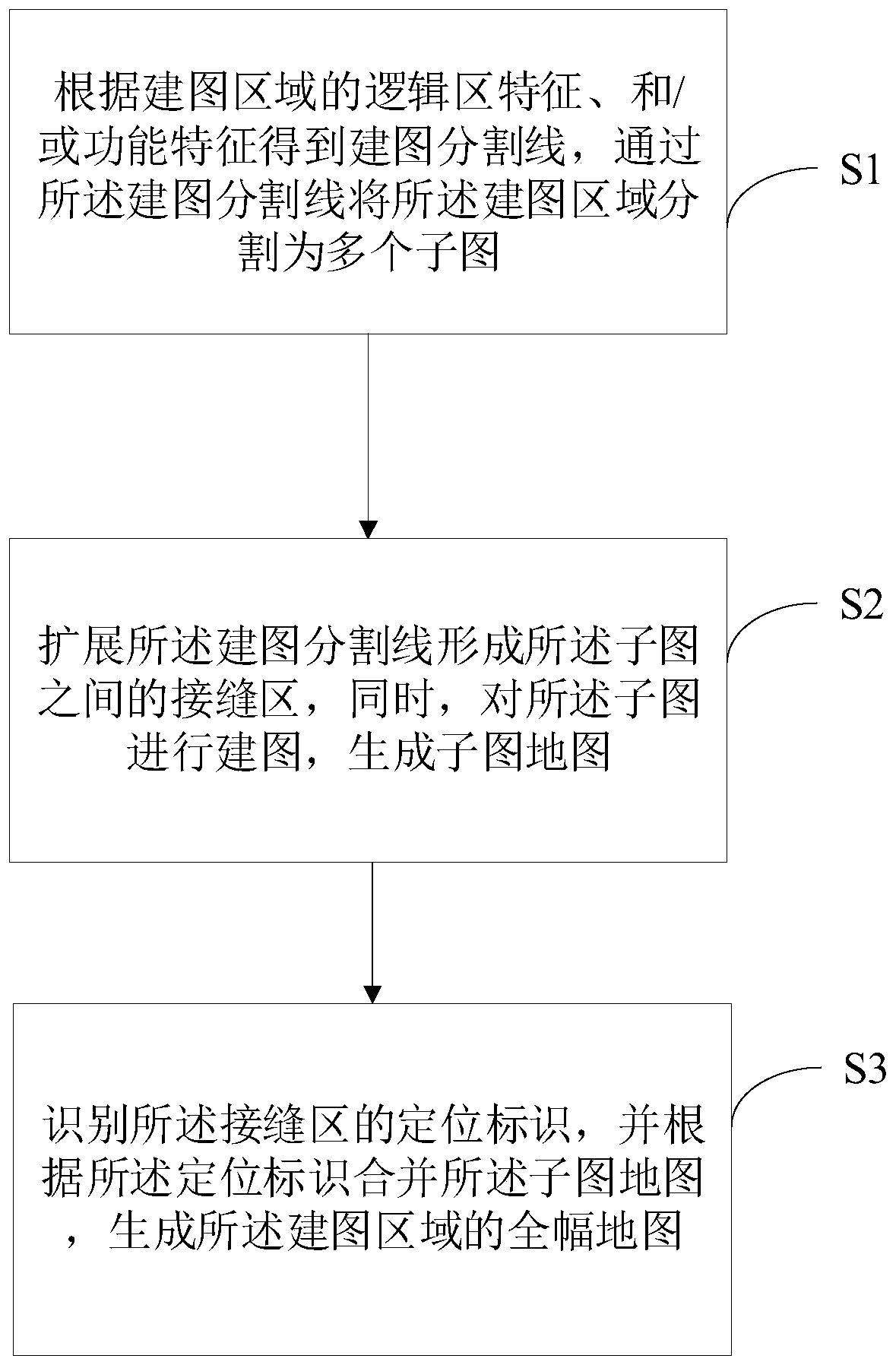
[0048] figure 1 It is the first flow chart of the robot joint mapping method provided by the embodiment of the present invention. This embodiment proposes a robot joint mapping method, the method comprising:
[0049] S1. Obtain a mapping dividing line according to the logical area characteristics and / or functional characteristics of the mapping area, and divide the mapping area into multiple sub-graphs through the mapping dividing line;
[0050] S2. Expand the mapping dividing line to form a seam area between the sub-graphs, and at the same time, perform mapping on the sub-graphs to generate a sub-graph map;
[0051] S3. Identify the positioning mark of the seam area, and merge the submap maps according to the positioning mark to generate a full map of the mapping area.
[0052] In this embodiment, firstly, a mapping division line is obtained according to the logical area characteristics and / or functional characteristics of the mapping area, and the mapping area is divided int...
Embodiment 2
[0057] Based on the above embodiment, in order to ensure that the perception error of each mapping robot for the environment of the mapping area is controlled within an acceptable range, in this embodiment, the sensor information of the robot will be calibrated according to the preset mapping measurement standard.
[0058] Specifically, it is first necessary to clarify the calibration scheme for each mapping robot in this embodiment, that is, use the same scene to establish a measurement standard, and on this basis, each individual mapping machine corrects itself according to the measurement standard to obtain data, so as to ensure that the perception error of each mapping robot for the environment of the mapping area is controlled within an acceptable range.
[0059] Then, determine the sensor solution adopted by each mapping robot in this embodiment. Among them, the common indoor solution sensors are as follows: Odom mechanical odometer, Imu (Inertialmeasurementunit) inertia...
Embodiment 3
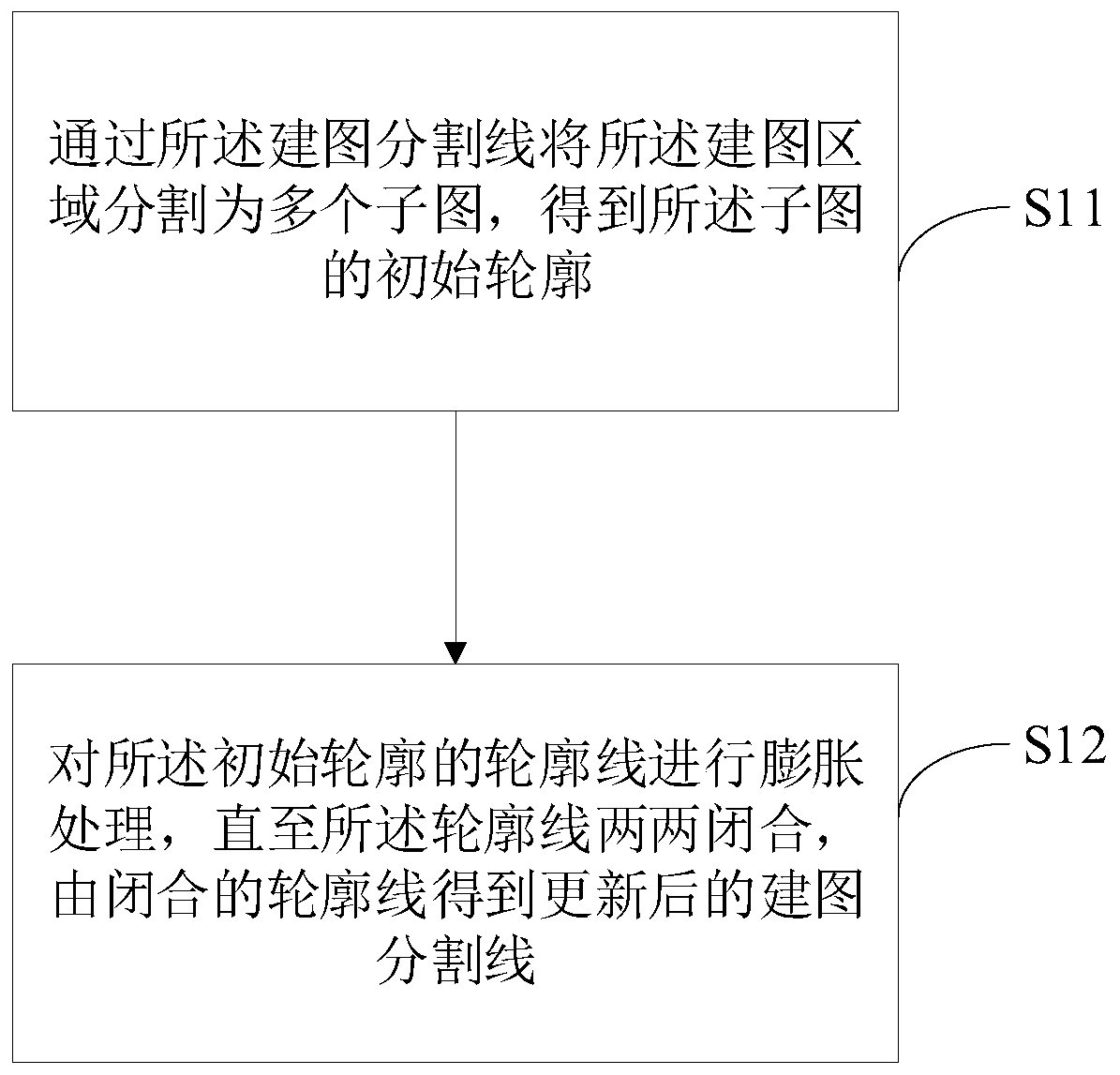
[0067] figure 2 It is the second flow chart of the robot joint mapping method provided by the embodiment of the present invention. Based on the above embodiment, in this embodiment, the mapping division line is obtained according to the logical area characteristics and / or functional characteristics of the mapping area, and the mapping area is divided into multiple sub-sections by the mapping division line. Figures, including:
[0068] S11. Divide the mapping area into a plurality of sub-graphs by using the mapping dividing line to obtain the initial outline of the sub-graphs;
[0069] S12. Perform expansion processing on the contour lines of the initial contour until the contour lines are closed in pairs, and an updated mapping dividing line is obtained from the closed contour lines.
[0070] Optionally, if it is identified that the positioning condition of the dividing line for building the map is not good, then an auxiliary positioning scheme such as a two-dimensional cod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More