

Uncertain mechanical arm fixed time track following control method with input saturation
A fixed-time, trajectory-tracking technology, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as low robustness of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0060] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
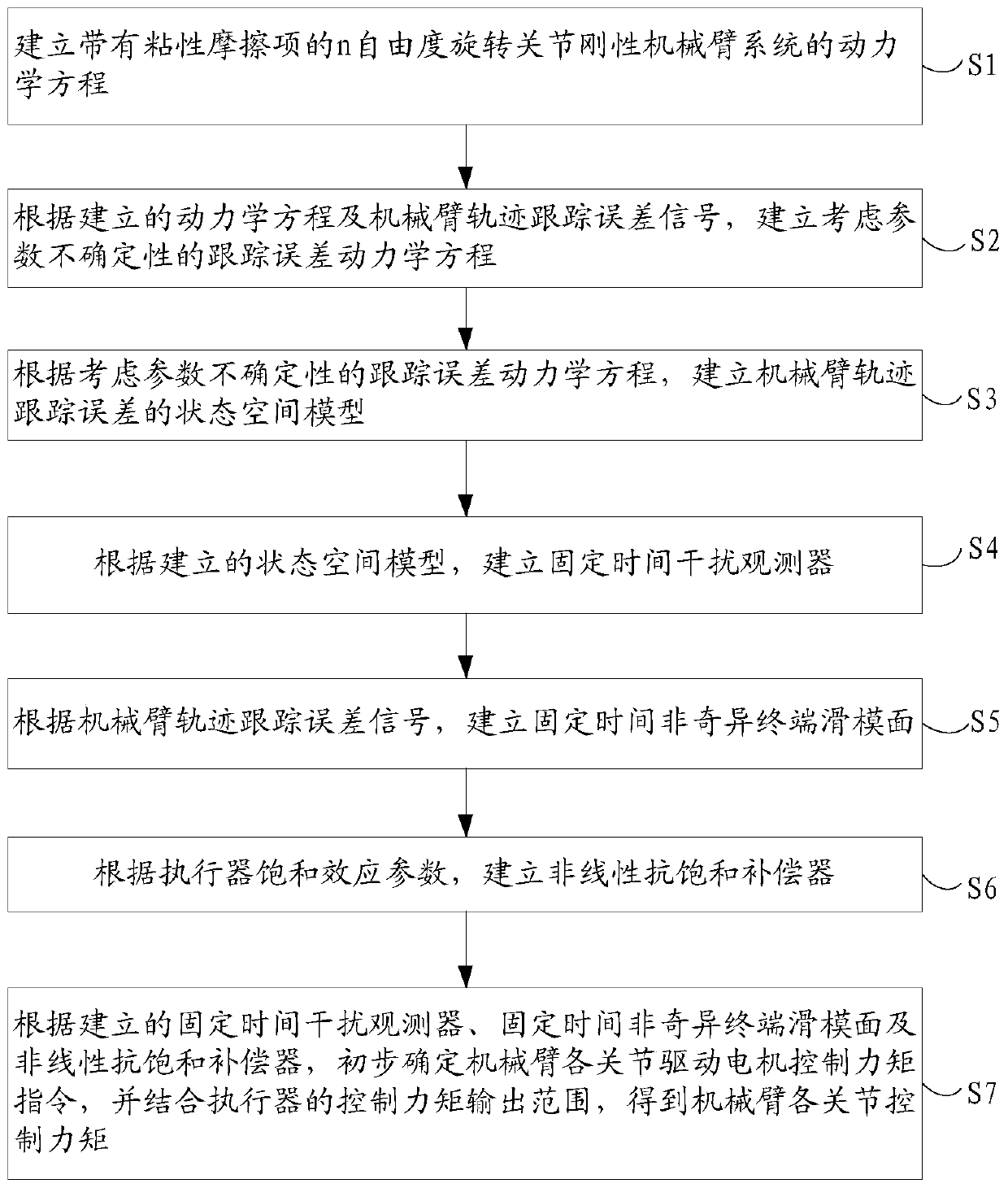
[0061] like figure 1 As shown, the fixed-time trajectory tracking control method of an uncertain manipulator with input saturation provided by an embodiment of the present invention includes:
[0062] S1, establish the dynamic equation of the n-DOF rotary joint rigid manipulator system with viscous friction term;
[0063] S2. According to the established dynamic equation and the trajectory tracking error signal of the manipulator, establish a tracking error dynamic equation considering parameter uncertainty, wherein the parameter uncertainty includes: dynamic modeling error and unknown external disturbance;
[0064] S3, according to the tracking error dynamic equation considering the parameter uncertainty, establish the state space model of the trajecto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More