Mechanical integrated joint with force sensing function
A technology of sensing function and joints, which is applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of low integration, reduce the overall precision of robots, and low rigidity of integrated joints, so as to improve the overall precision, compact structure, and avoid cantilever installation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Below, the present invention will be further described in conjunction with the accompanying drawings and specific implementation methods. It should be noted that, under the premise of not conflicting, the various embodiments described below or the technical features can be combined arbitrarily to form new embodiments. .
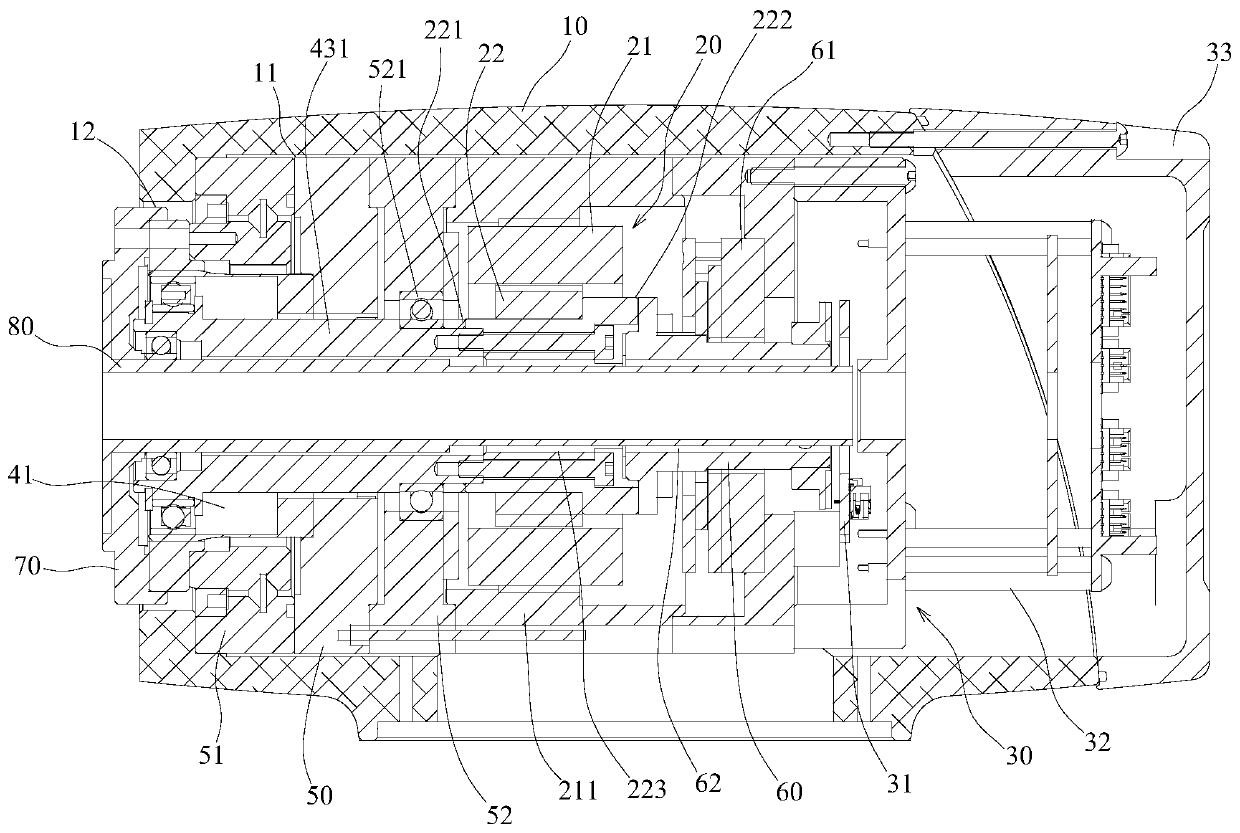
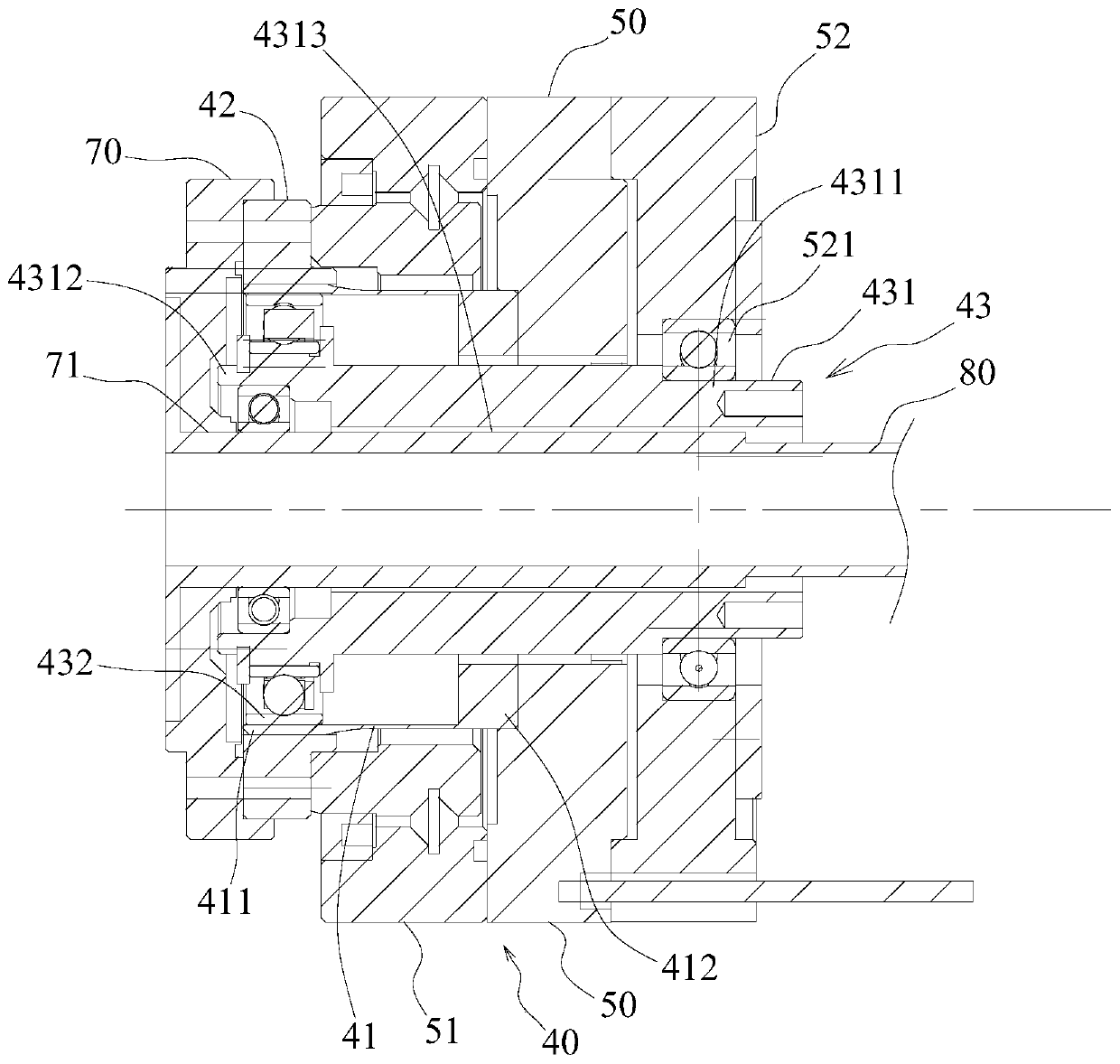
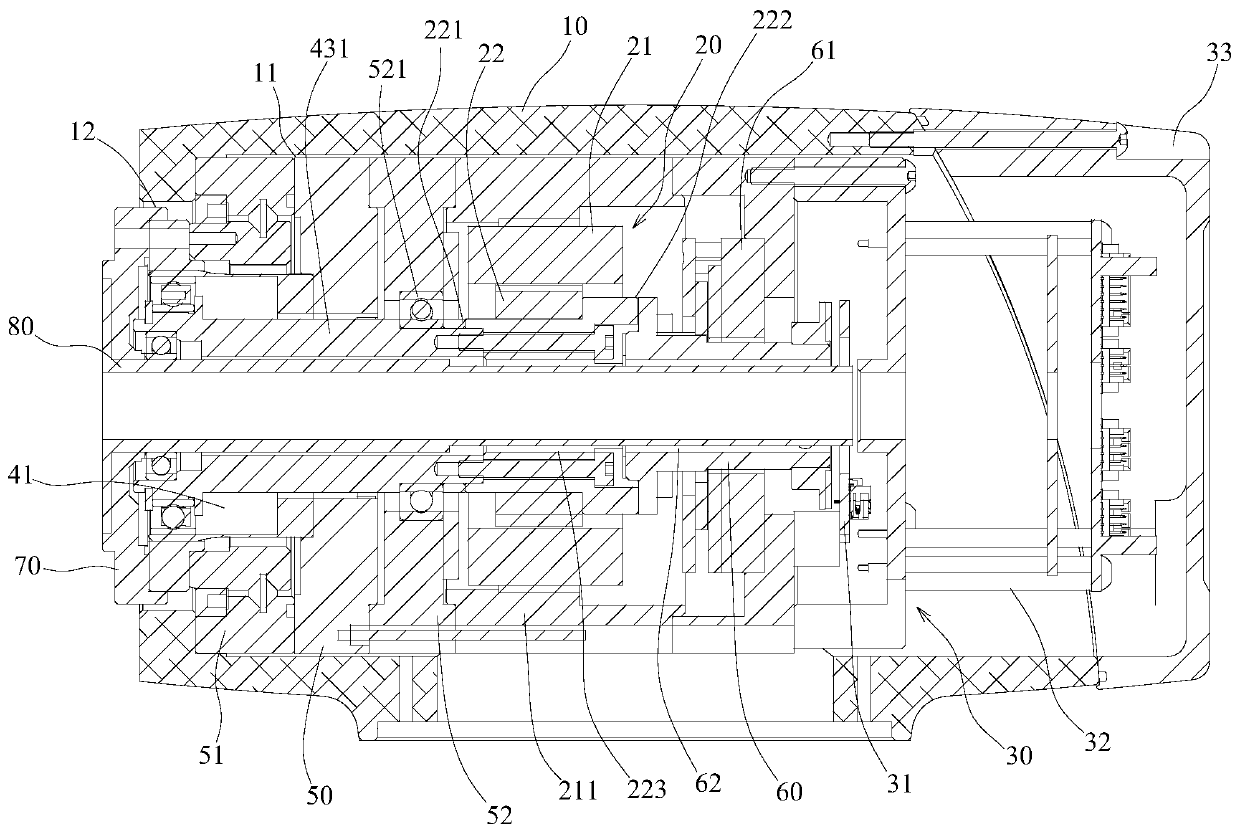
[0024] Such as Figure 1 ~ Figure 2 As shown, in order to improve the overall transmission accuracy of the mechanical arm, make the mechanical integrated joint more compact and have higher precision, the present invention provides a mechanical integrated joint with force sensing function, which includes a joint housing 10, which is used as the joint housing 10 of the present invention. The shell of the mechanically integrated joint with force sensing function has an installation inner cavity 11 for installing joint components inside it, and an opening 12 communicating with the installation inner cavity 11 is opened on the joint shell 10. The opening 12...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap