Amphibious bionic hexapod robot
A hexapod robot, amphibious technology, applied in amphibious vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of reducing the stability of robots, improve versatility and interchangeability, reduce quality, and enhance motion performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
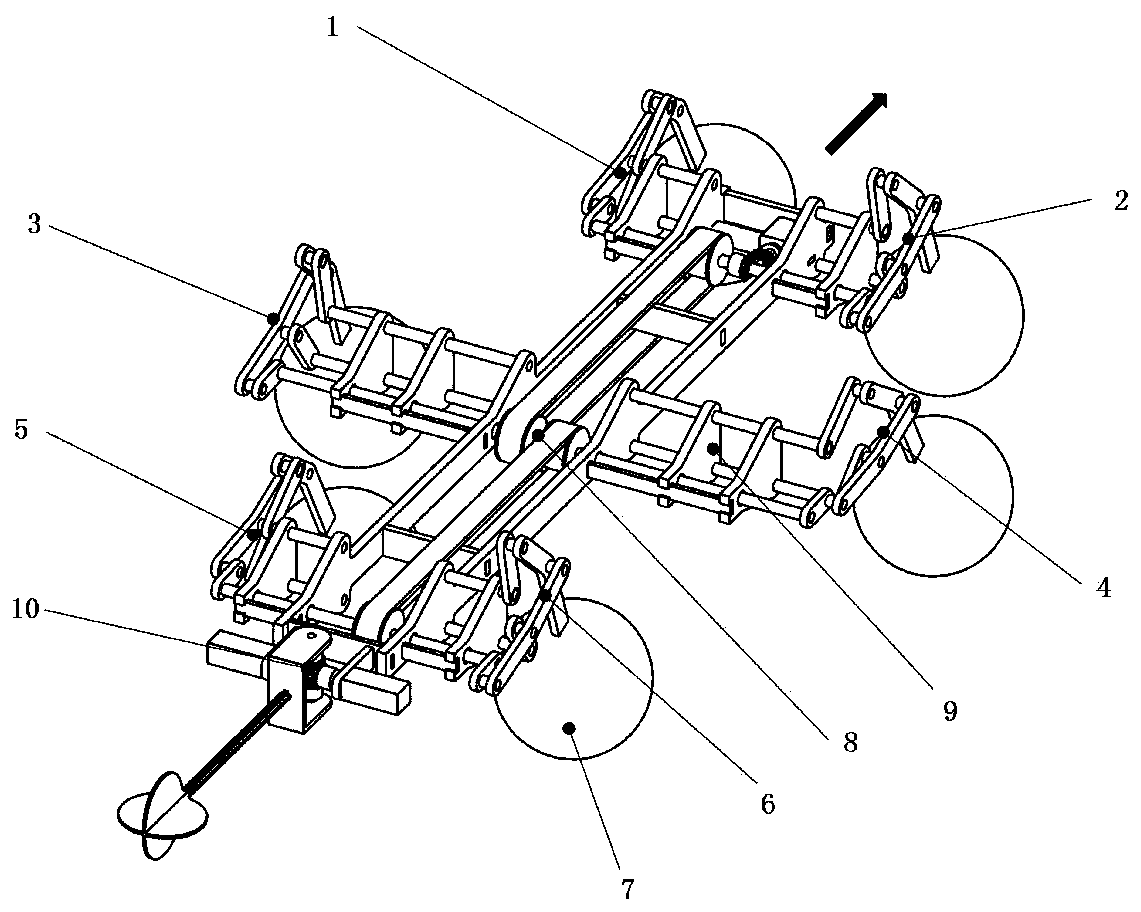
[0027] Such as figure 1 As shown, the amphibious bionic hexapod robot of the present embodiment includes a fuselage and six legs (leg 1, leg 2, leg 3, leg 4, leg 5, leg 6) symmetrically distributed on both sides of the fuselage. ) and a drive system for driving the movements of the legs; the six legs have the same structure and are symmetrically distributed on both sides of the fuselage, which can improve the stability of the robot; the fuselage includes two side plates 21 and Two beams 22 are fixed between the two side plates 21 .
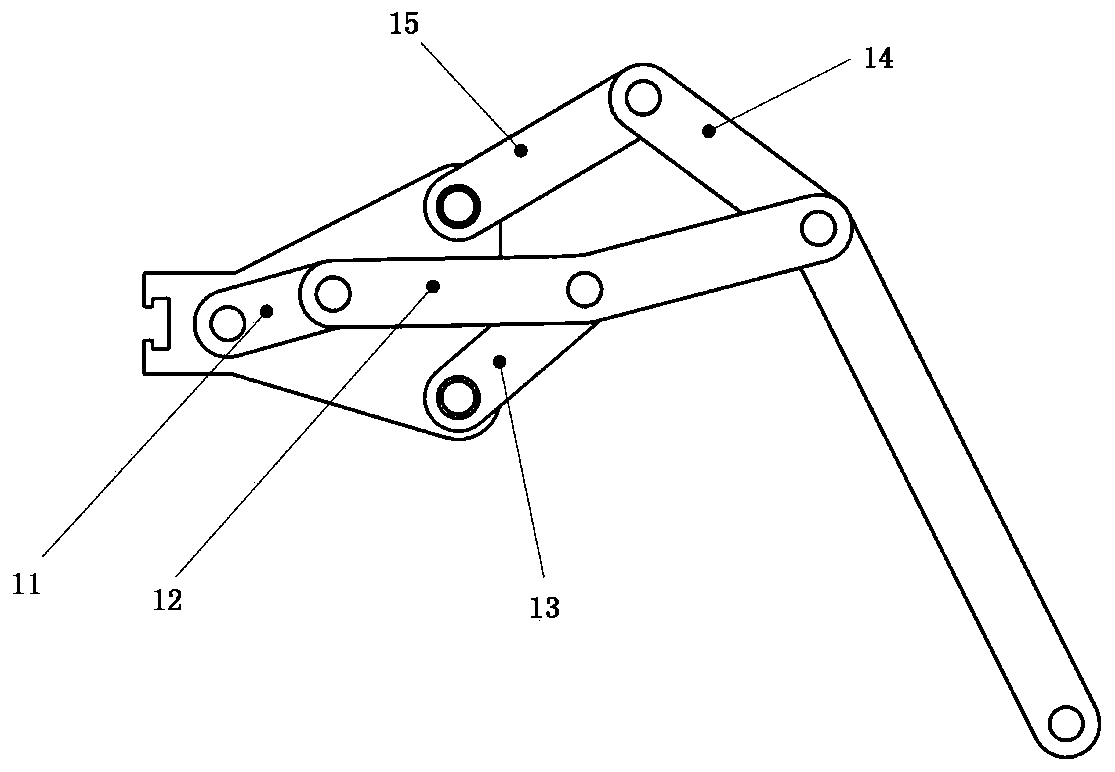
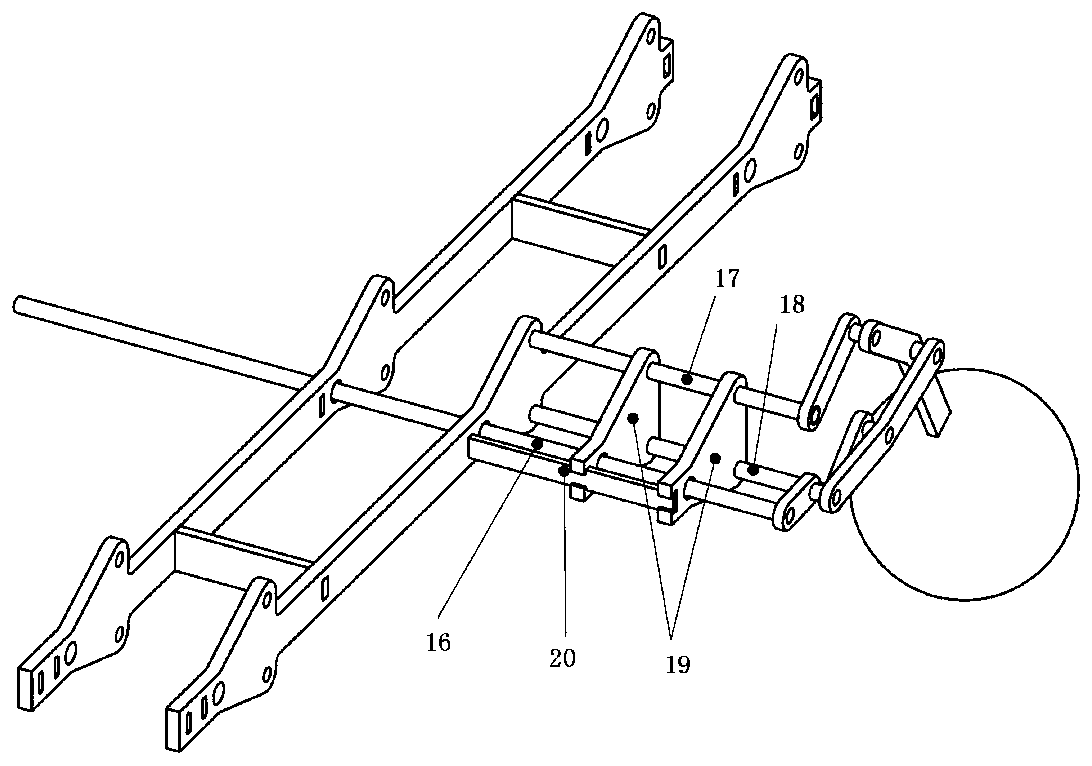
[0028] Such as image 3 As shown, the legs include a spherical plastic foot 7 and a Klann six-bar linkage for driving the movement of the spherical plastic foot 7; figure 2 As shown, the Klann six-bar linkage mechanism includes connecting rod I11, connecting rod II12, connecting rod III14, connecting rod IV15, and connecting rod V13; the fuselage, connecting rod I11, connecting rod II12, connecting rod III14 and connecting rod Ⅳ15 is hinged in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com