

Polypod deformation robot based on Schatz mechanism
A robot and fuselage deformation technology, which can be applied to manipulators, motor vehicles, program-controlled manipulators, etc., and can solve the problems of limited movement modes of a single Schatz mechanism.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be described in further detail below in conjunction with the accompanying drawings.
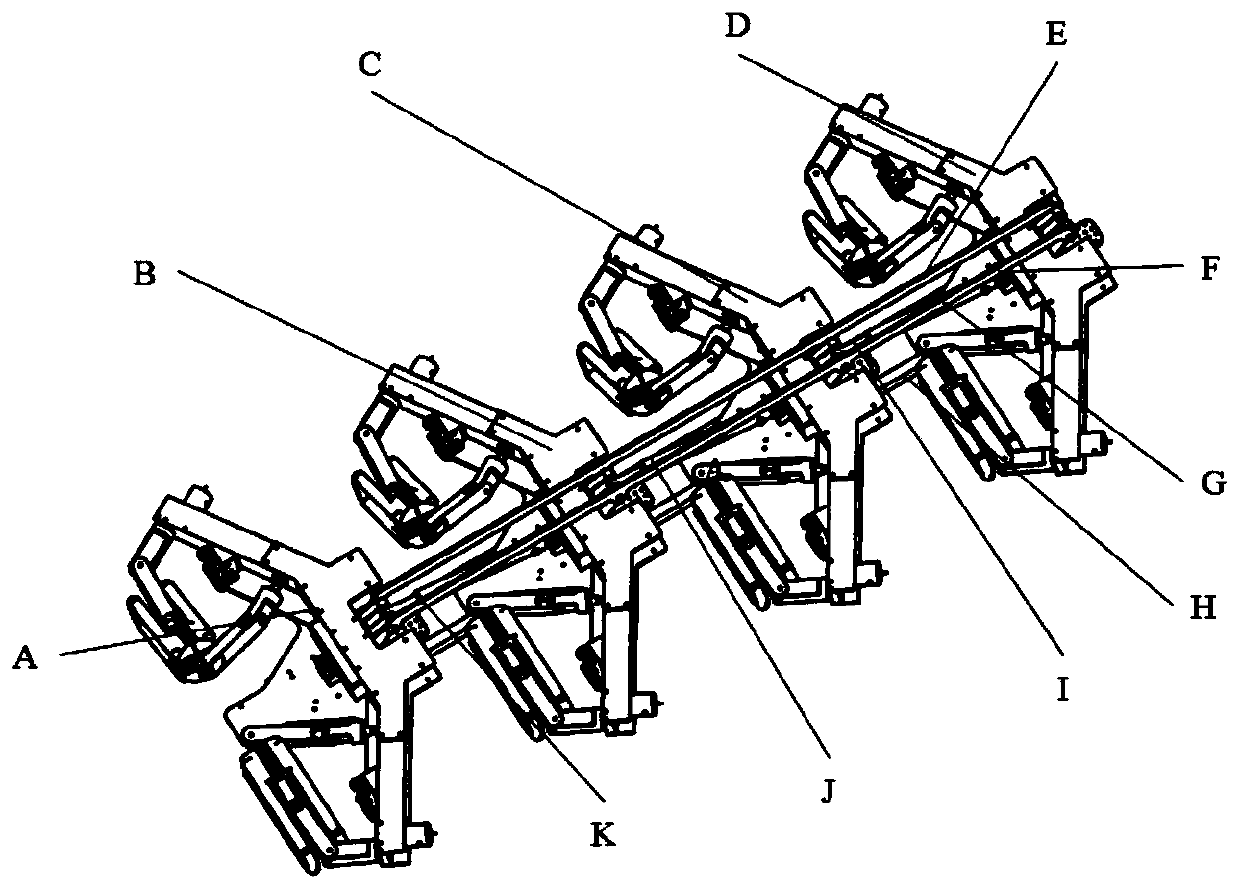
[0065] A multi-legged deformable robot based on the Schatz mechanism, such as figure 1 Shown, a kind of multi-leg deformation robot based on Schatz mechanism is characterized in that: the first to the fourth biped module, the first deformation support frame, the second deformation support frame, the first fuselage skeleton, the second fuselage skeleton , first putter, second putter, third putter.
[0066] The first and second deformation support frames and the first and second fuselage frames are provided with connection holes, which are respectively connected with the first to fourth bipedal modules, and are respectively located on the upper and lower sides of the first to fourth bipedal modules .
[0067] The chassis of the first biped module is provided with connecting holes, which are fixedly connected with the first and second fuselage frames through s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More