Online feedback hand-eye calibration method based on weighted least square method
A least squares method, hand-eye calibration technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large error of rotation matrix results, time-consuming nonlinear solution, affecting the accuracy of calibration results, etc., to reduce the impact, Improved accuracy and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
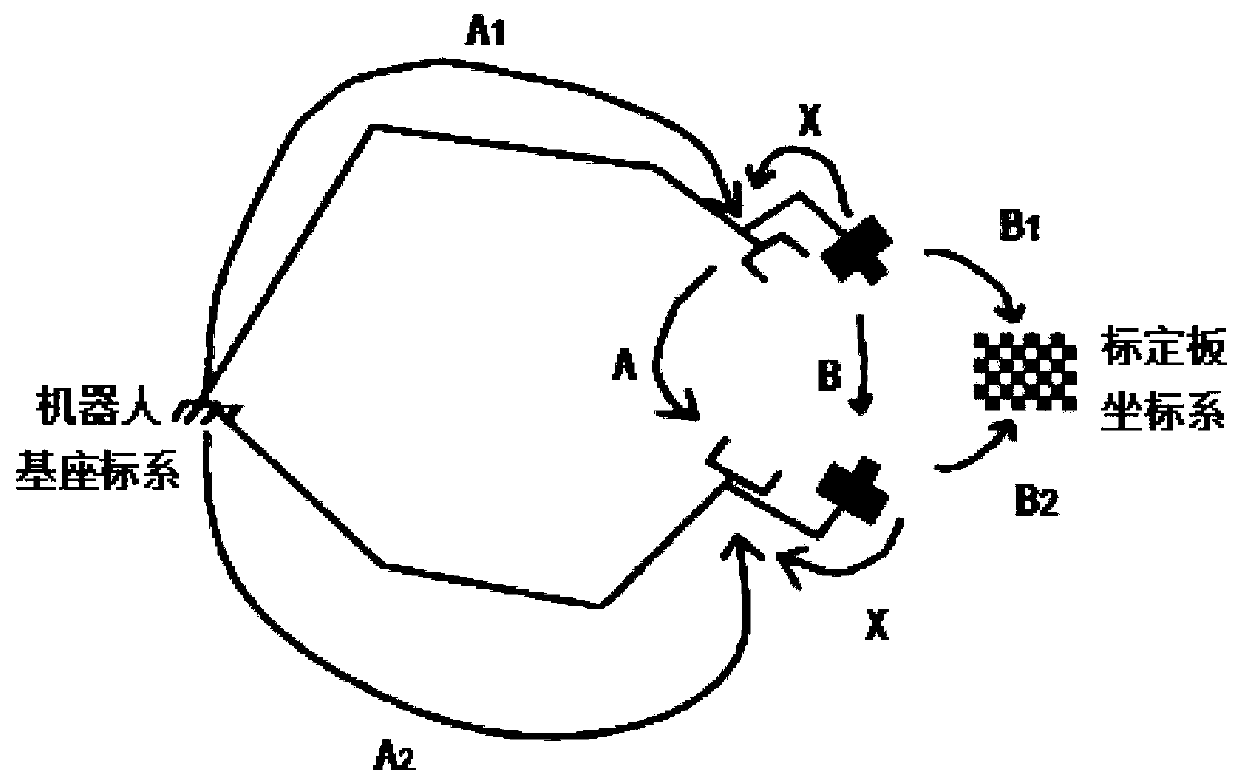
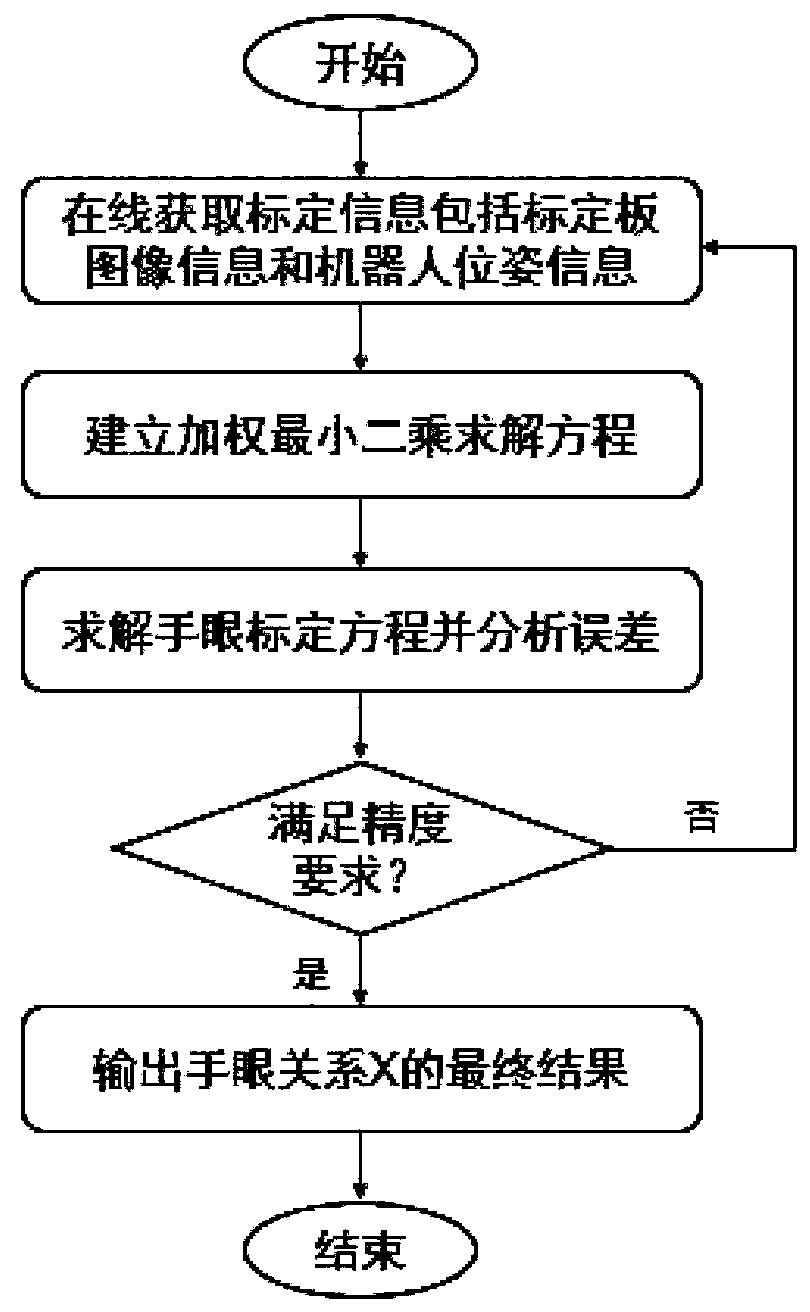
[0036] In this embodiment, the online feedback hand-eye calibration method based on the weighted least square method is mainly composed of online acquisition of calibration information, calibration calculation module, error calculation and online feedback. First, the calibration information that meets the calibration requirements is obtained by obtaining the calibration information online; then the calibration calculation module is used to obtain the data of A and B in AX=XB according to the parameters of the camera, the image of the calibration board and the parameters of the mechanical arm, and then through the weighted minimum The square multiplication method solves the result of hand-eye calibration, that is, AX=X in XB; finally, the calibration error is analyzed according to the solution result, and the error calculation result is fed back to the online feedback part in real time to judge whether it meets the calibration accuracy requirements and meets the requirements The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More