

Air route planning method for multi-unmanned aerial vehicle target positioning
A technology for target positioning and route planning, applied in three-dimensional position/channel control, vehicle position/route/altitude control, navigation calculation tools, etc., can solve problems such as poor practicability, achieve fast planning speed, small amount of calculation, and less information Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
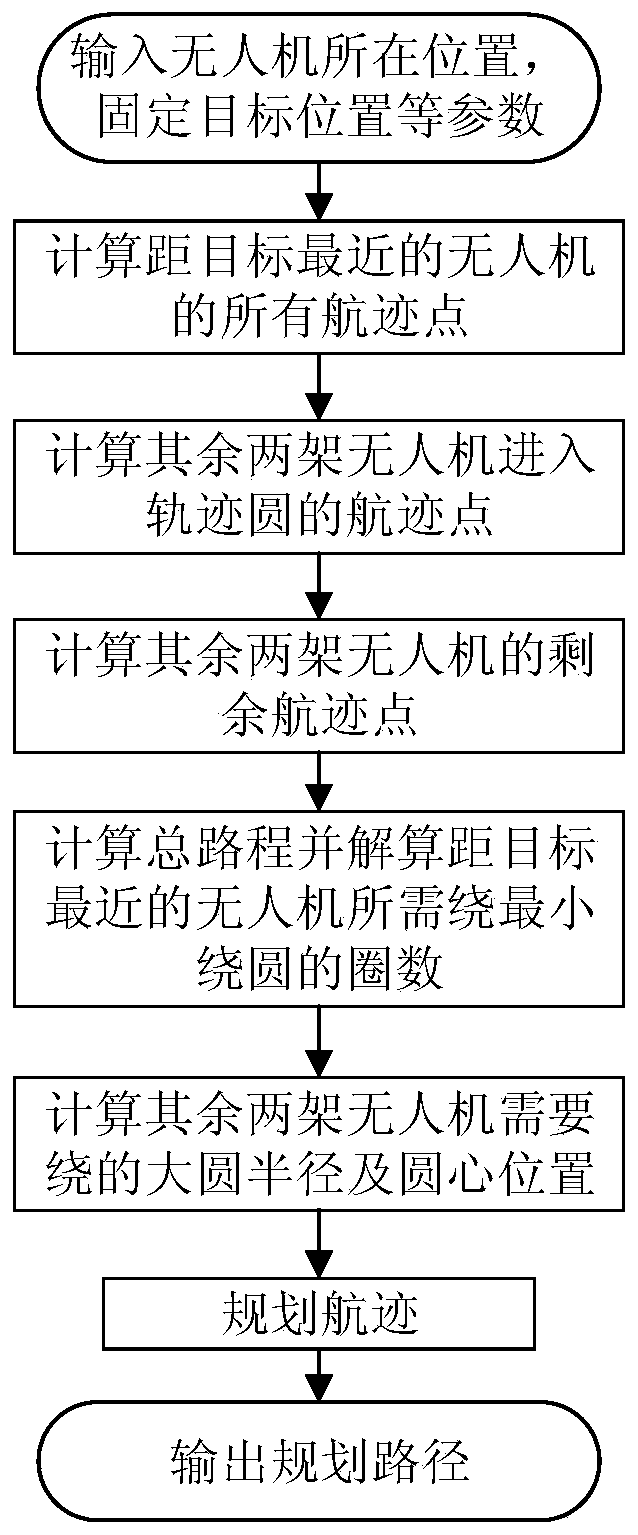
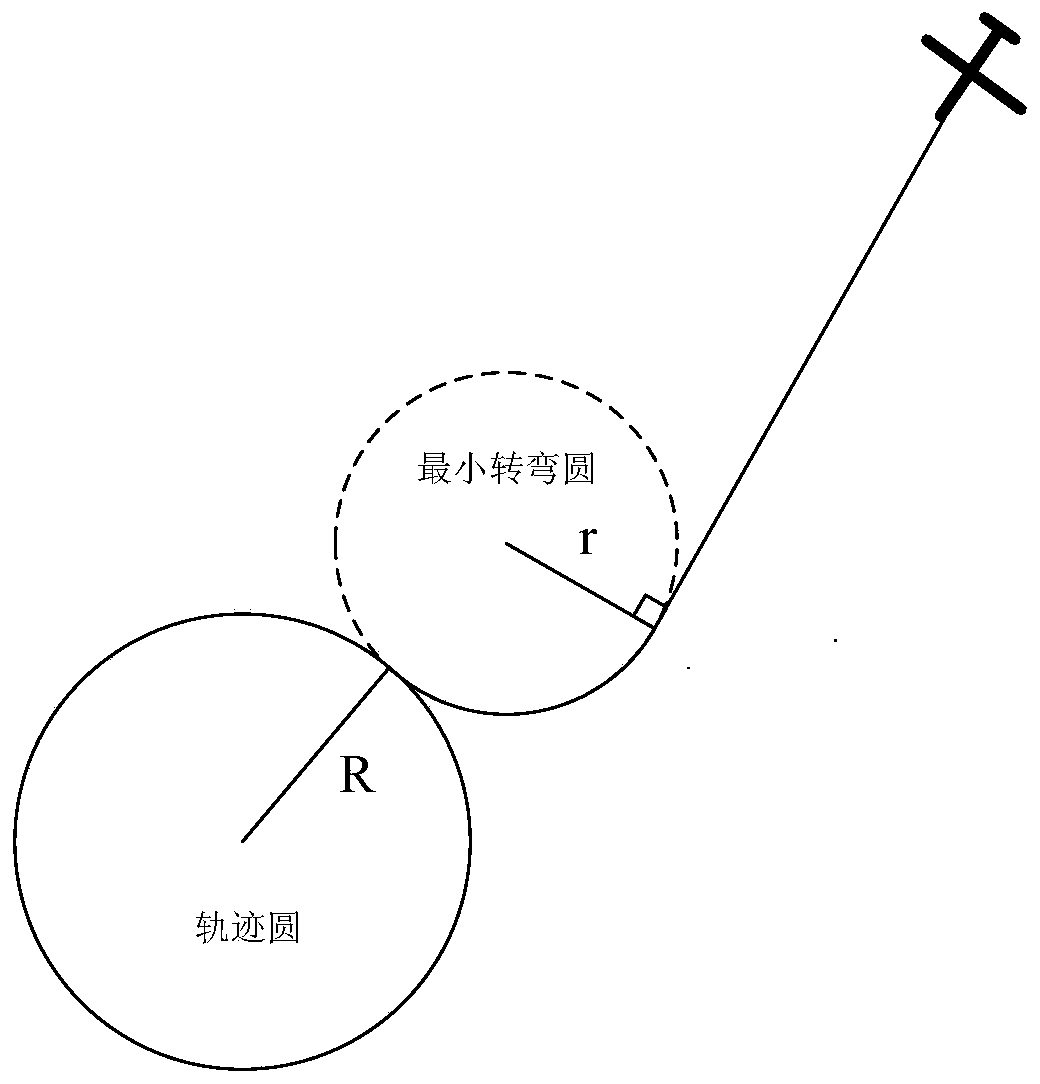
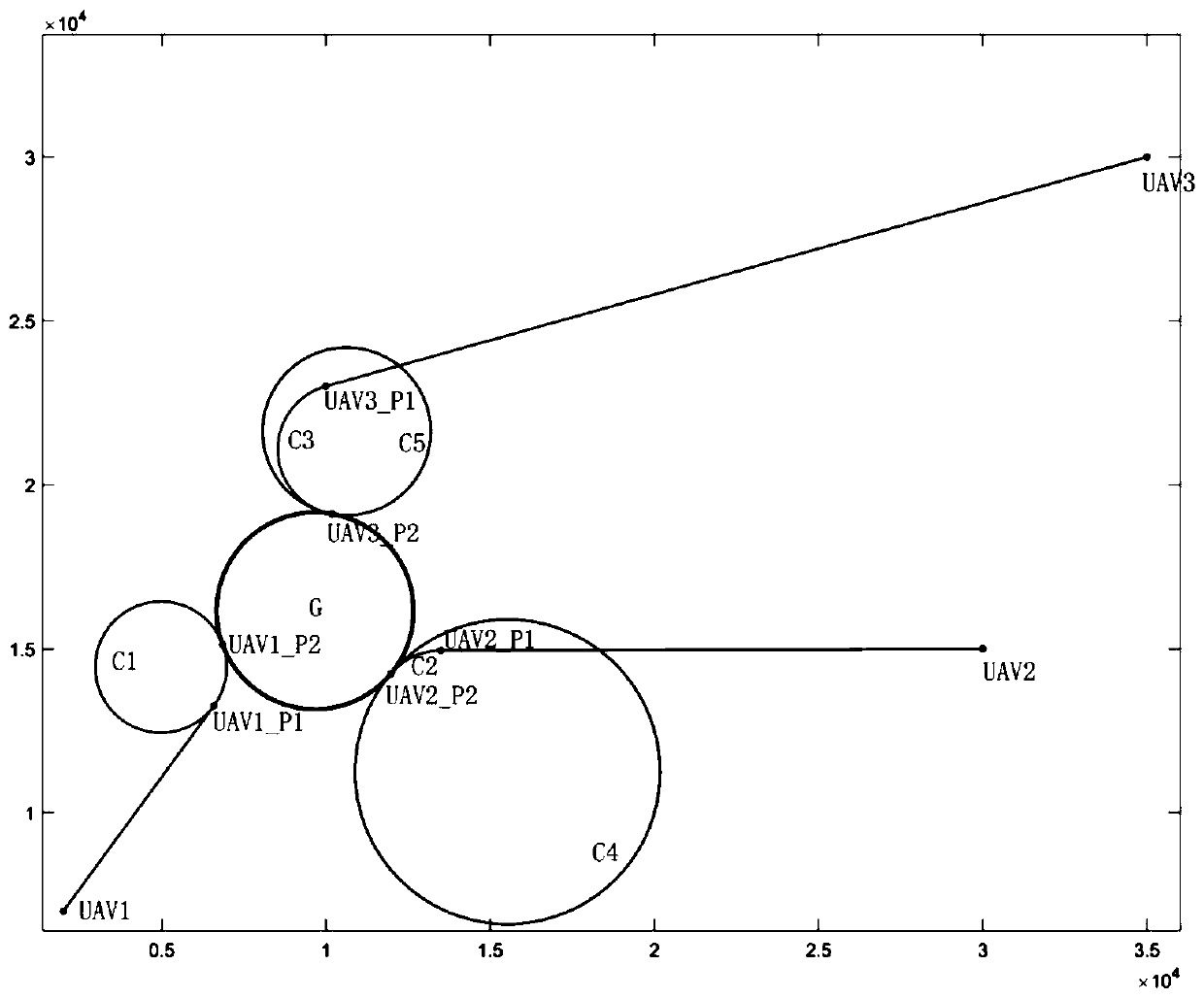
[0045] refer to Figure 1-3 .
[0046] After the UAV searches for the target, the three UAVs themselves are randomly distributed according to a certain rule, and the three UAVs are in a diagonal formation configuration. First, determine the direction in which the UAV flies around the target, and then Plan the track points for each drone.
[0047] The specific steps of the route planning method of multi-UAV target positioning of the present invention are as follows:
[0048] Step 1: Obtain the location information of the UAV by the navigation system of the UAV, and the approximate location of the ground fixed target obtained by searching. Obtain the drone's flight speed, maximum roll angle, and radius of the trajectory circle flying around a fixed target as initialization parameters. Assume that the routes of three UAVs need to be planned.
[0049] Step 2: Assume that the three UAVs are numbered {UAV1, UAV2, UAV3}, and their position coordinates are {[x1, y1], [x2, y2], [x3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More