A method to improve the accuracy of automatic pick-and-place workpiece
An automatic pick-and-place and precision technology, applied in manufacturing tools, program-controlled manipulators, manipulators, etc., can solve problems such as insufficient precision of manipulators, achieve the effect of improving the accuracy of picking materials, reducing cumulative errors, and eliminating positioning errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
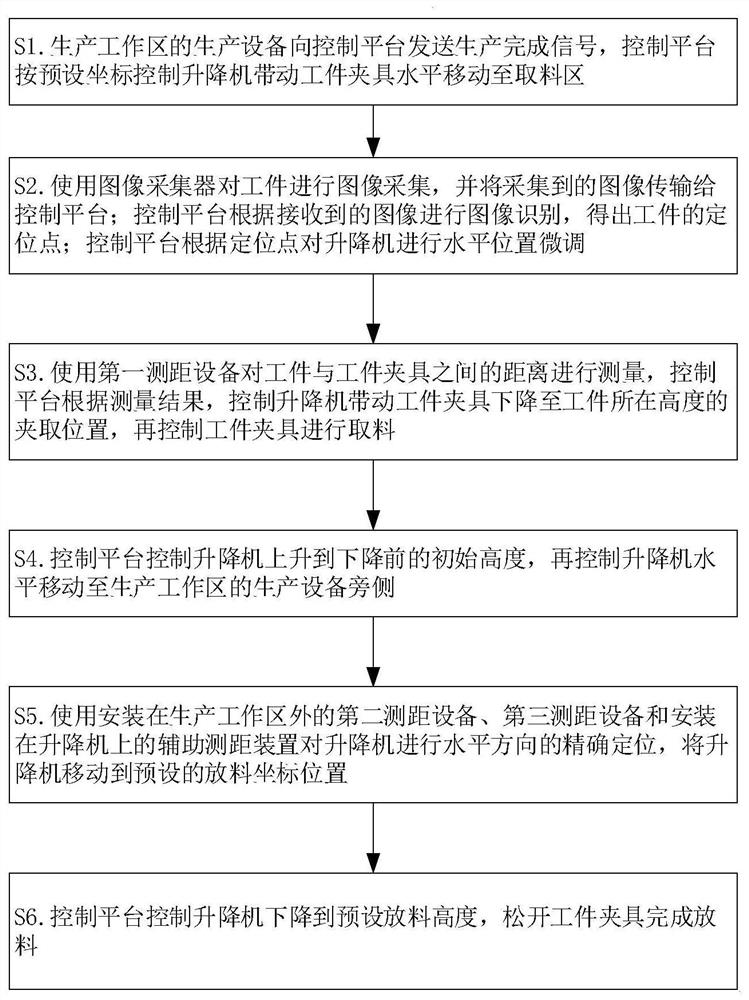
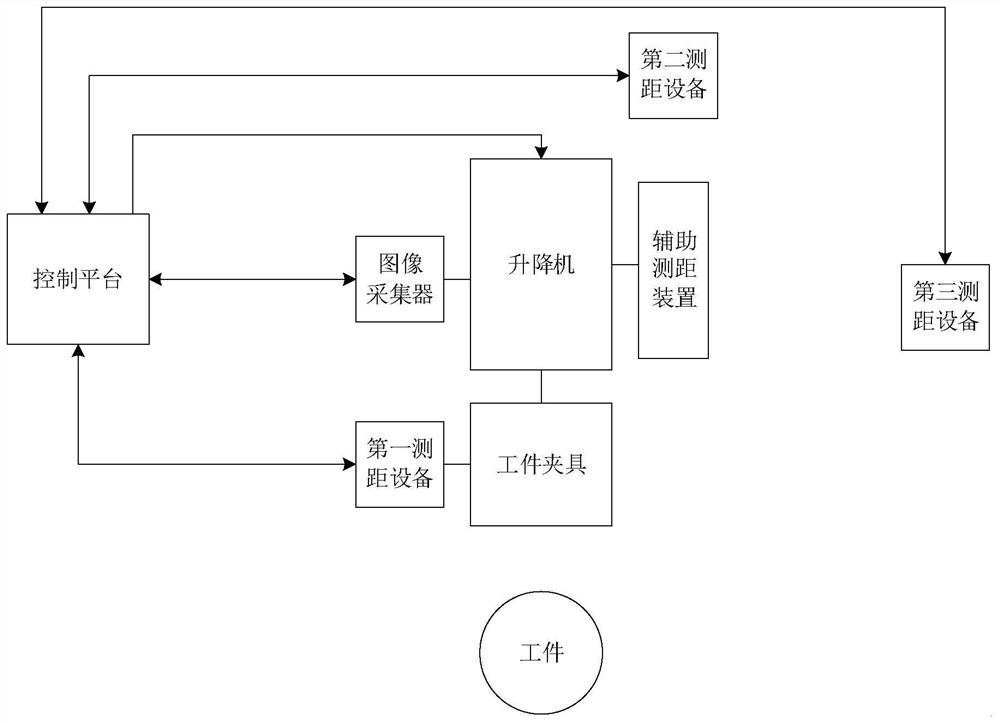
[0042] Such as figure 1 and figure 2 As shown, the present invention provides a method for improving the accuracy of automatic pick-and-place workpieces, comprising the following steps:
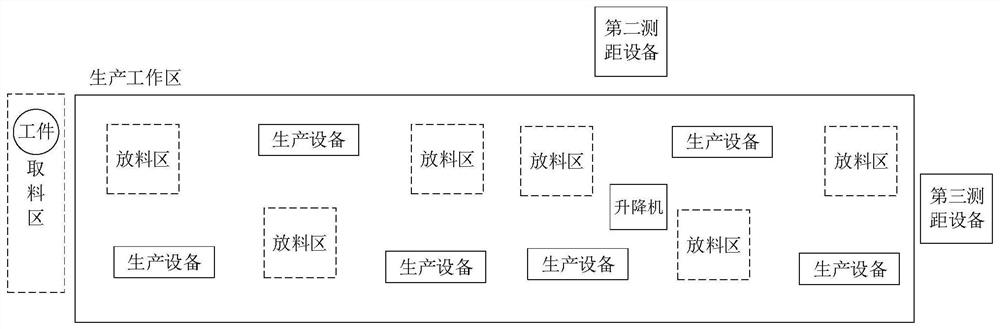
[0043] S1. The production equipment in the production work area sends a production completion signal to the control platform. After the control platform receives the production completion signal sent by the production equipment, it first controls the elevator to move horizontally back to the preset origin coordinates, and then controls the elevator to drive the workpiece fixture to move horizontally to Reclaiming area, there are workpieces stacked in the reclaiming area;
[0044] S2. Use the image collector to collect the image of the workpiece, and transmit the collected image to the control platform; the control platform performs image recognition according to the received image, and obtains the positioning point of the workpiece; the control platform levelizes the elevator according to t...
Embodiment 2
[0071] In Example 1, when the gripper of the manipulator is used to grab the workpiece, a CCD industrial camera can only be used to collect the two-dimensional image of the tray. There may be a certain deviation in the center of the disc hole. In this way, the positioning point selected when the control platform controls the lifting platform to fine-tune the horizontal position will not be located at the same spatial coordinate point as the actual desired positioning point, which will affect the fine-tuning accuracy.
[0072] In order to solve the above-mentioned technical problems, on the basis of Embodiment 1, further optimize, and install another high-precision CCD industrial camera on the elevator, so that there are two CCD industrial cameras on the elevator, through binocular vision recognition in machine vision , using the images captured by two CCD industrial cameras for three-dimensional reconstruction of spatial coordinates. Specifically, the first CCD industrial cam...
Embodiment 3
[0076] In the actual process of picking and unloading materials, there may be a situation where the gripper claws of the manipulator grab empty. At this time, the actual number of materials to be taken and discharged will deviate from the ideal quantity; because the quantity of materials to be taken and discharged is not accurate, It will cause the production equipment in the production work area to be shut down and wait for materials.
[0077]In order to solve the above-mentioned technical problems, on the basis of Embodiment 1, the following technical solutions are adopted: before reclaiming, the control platform can also judge the reclaiming position according to the height information of the receptacle measured by the first laser rangefinder. Whether there is a tray, and can count the number of trays each time, to determine whether the number of trays picked up is consistent with the number set by the operator in the system; if the number is inconsistent, the control platfo...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap