

Adsorption type obstacle-crossing pole-climbing bionic robot
A bionic robot and adsorption technology, which is applied in the mechanical field, can solve the problems that the pole-climbing robot cannot overcome obstacles, is damaged, and has poor firmness, and achieves the effects of improving walking speed and reliability, fast walking speed, and strong obstacle-surmounting ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention is described in detail below in conjunction with accompanying drawing:
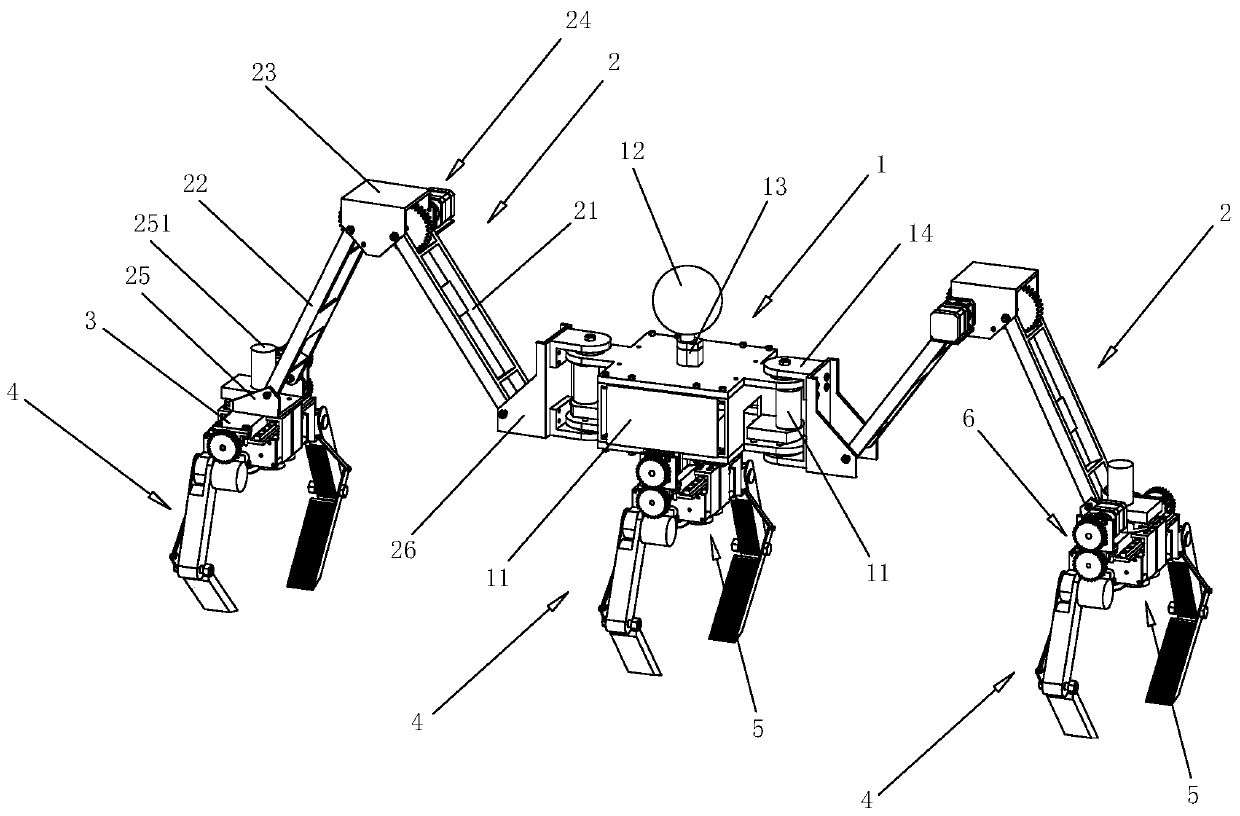
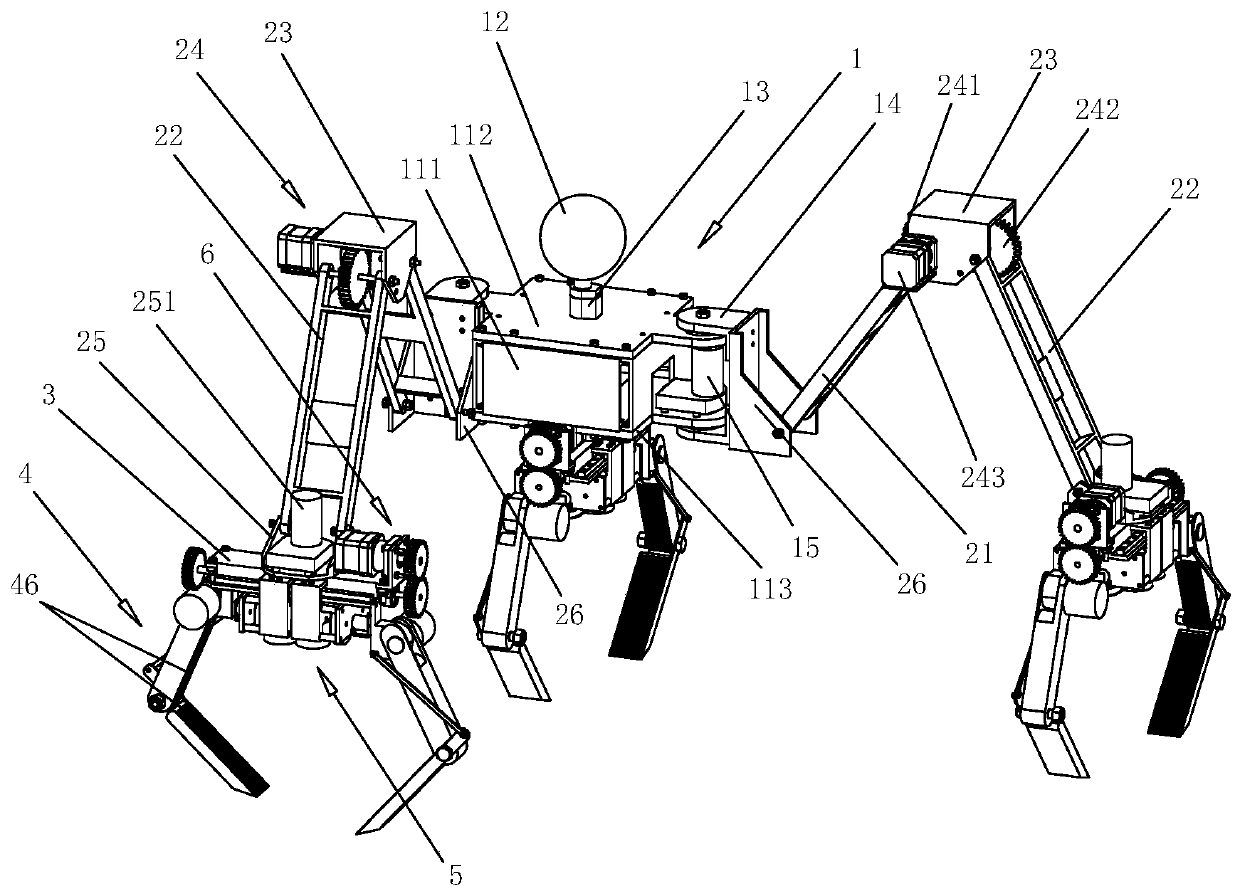
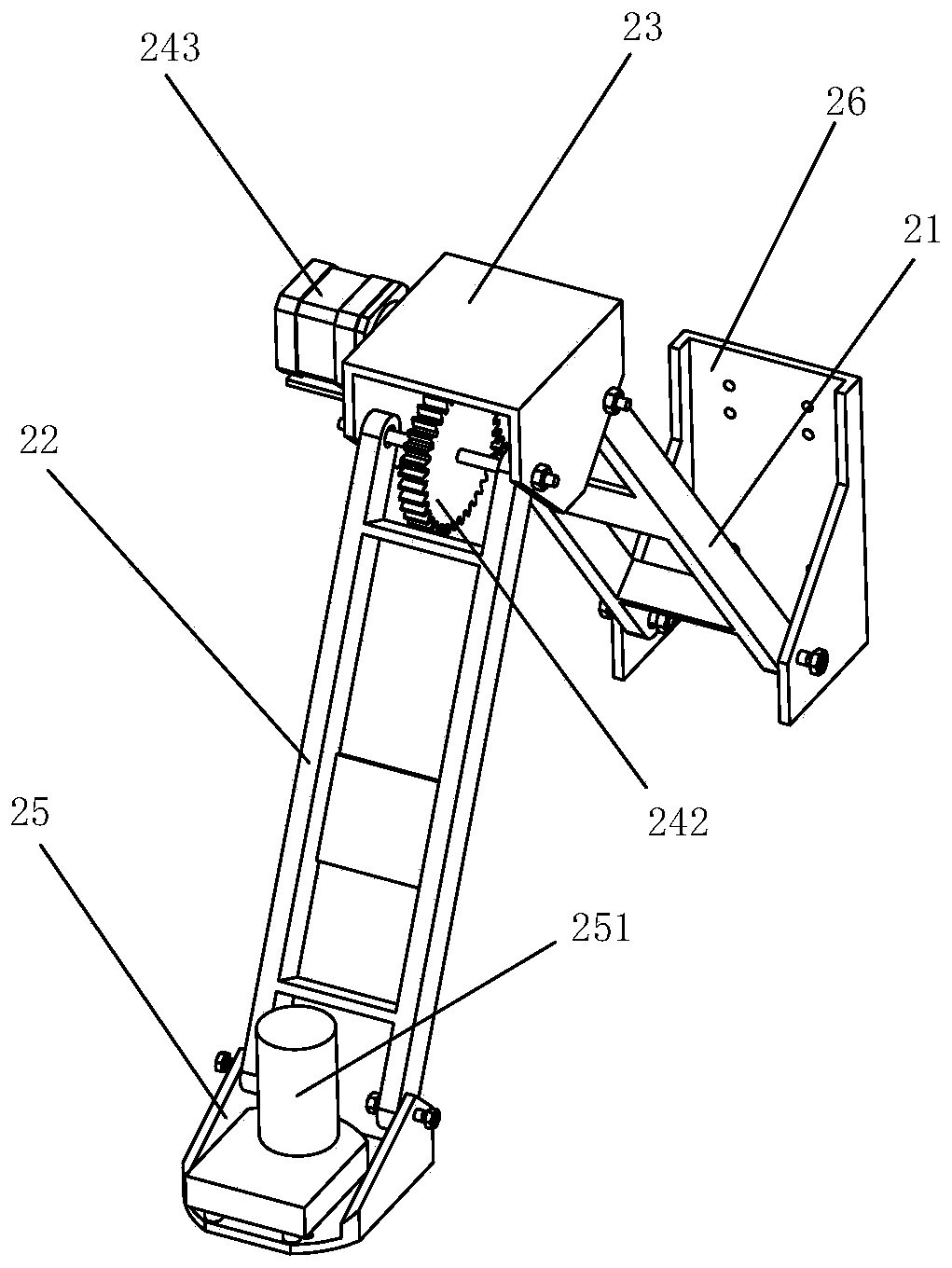
[0040] combine Figure 1 to Figure 6 , an adsorption-type bionic robot that can overcome obstacles and climb poles, including a control box 1, a mechanical arm 2, a clamping device, and a control system. The control box 1 includes a box body 11, a rotating support plate 14, and a camera 12. The box body 11 is composed of The box side plate 111, the box top plate 112 and the box bottom plate 113 are fixedly connected by bolts to form a square structure. The bottom of the box bottom plate 113 is fixedly equipped with gaskets for the purpose of cushioning and shock absorption. The inside of casing 11 is fixedly installed with push rod motor 13, and described camera 12 is positioned at casing 11 tops, and is fixedly mounted on the output end by push rod motor 13, and push rod motor 13 controls camera 12 motion, and described camera 12 The signal end is electrically connected with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More