

Rotary laser radar and SLAM robot for indoor map construction and positioning
A lidar and indoor map technology, applied in the field of robotics, can solve the problems of low data accuracy and difficulty in building three-dimensional maps, and achieve the effect of ensuring comprehensiveness, high resolution and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
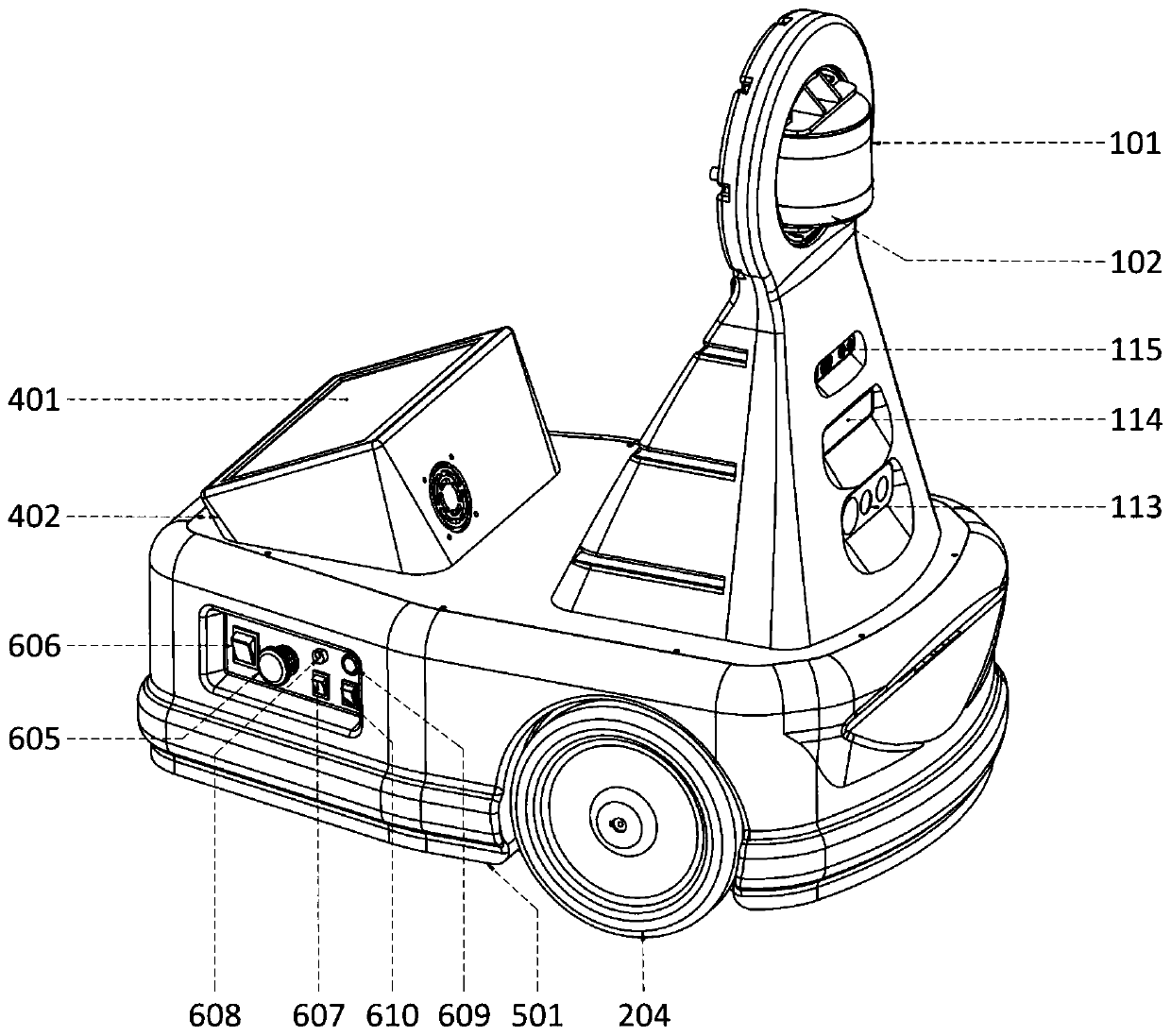
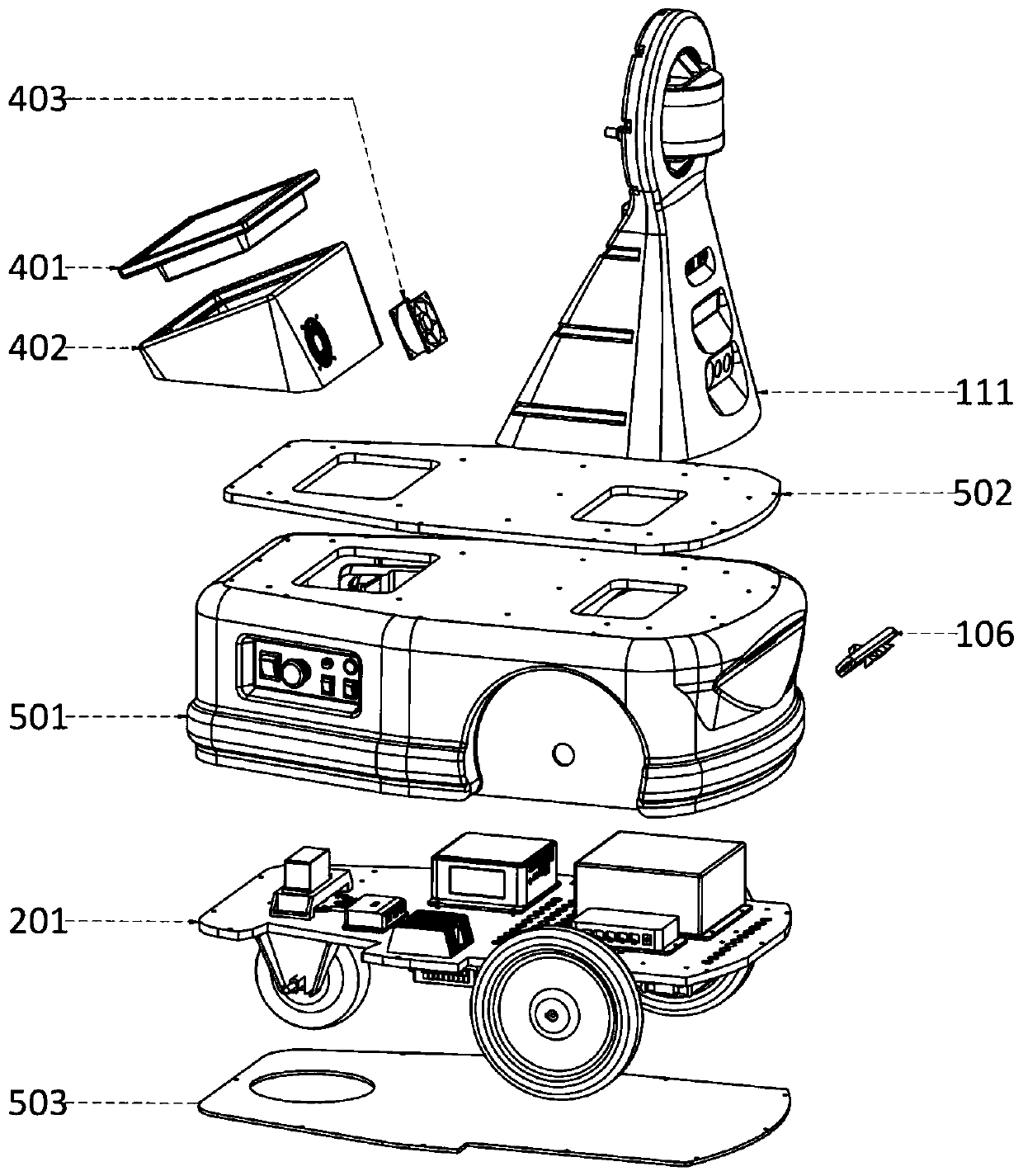
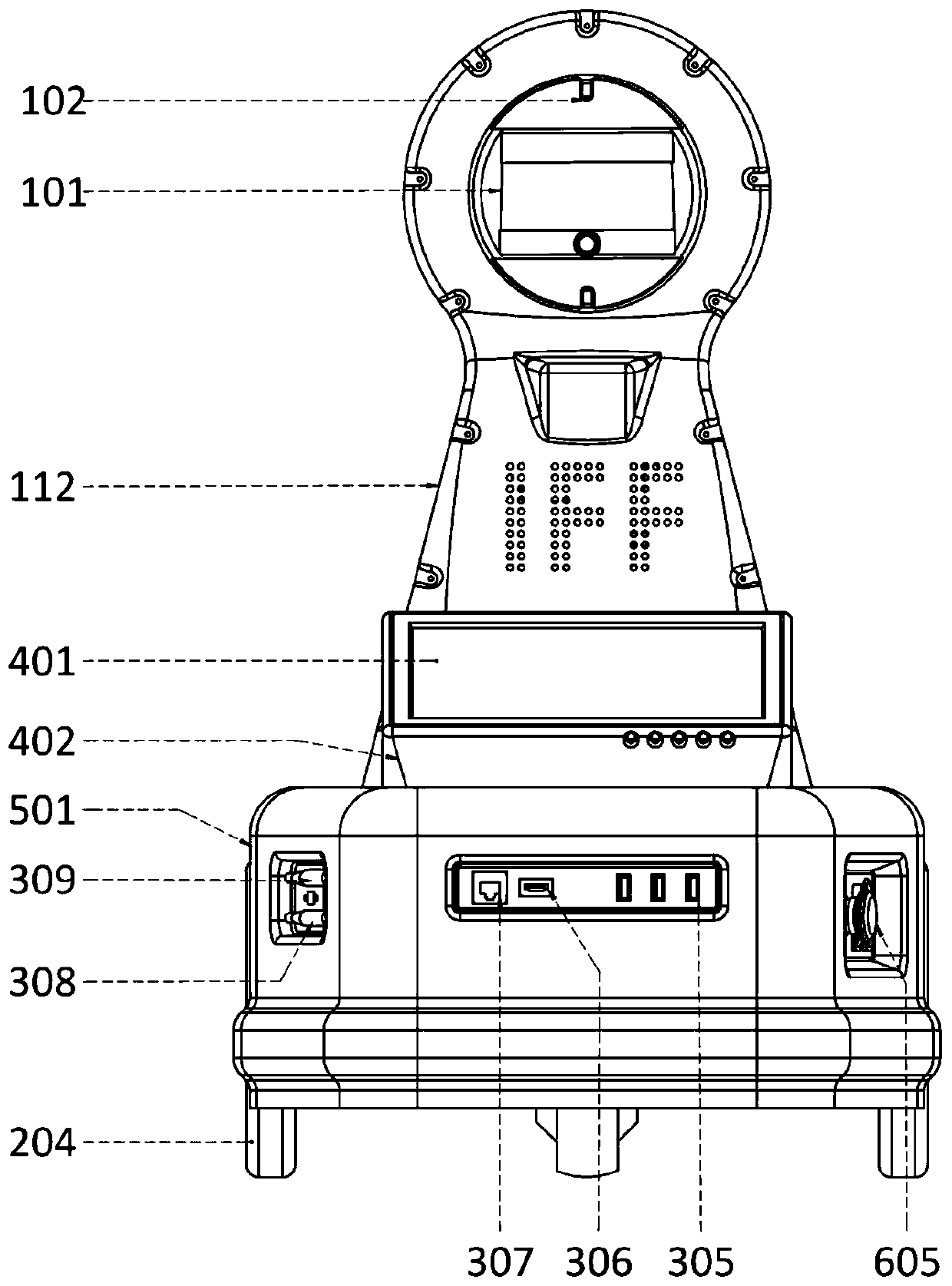
[0037] Such as figure 1 As shown, the SLAM robot for indoor map construction and positioning involved in the present invention includes an environment scanning unit 1, a motion unit 2, a data processing unit 3, a display unit 4, a main body shell 5, a power supply unit 6 and a pose capture unit 7; The scanning unit 1 scans the surrounding environment of the SLAM robot through the camera module and the rotating lidar to obtain environmental information data; the motion unit 2 is used to realize the walking movement of the robot; the data processing unit 3 constructs a three-dimensional map, obstacle avoidance and positioning based on the acquired data; display Unit 4 is used to display the results obtained by the data processing unit to realize human-computer interaction; the main body shell 5 provides support and protection for other units of the robot from external damage; the power supply unit 6 provides electrical energy for the robot; the pose capture unit 7 is used to cap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More