Workpiece grabbing method and device based on vision system
A vision system and workpiece technology, applied in the field of workpiece grasping, can solve problems such as unfavorable, time-consuming, and shortening the tempo of automated production
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0042]In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. the embodiment. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
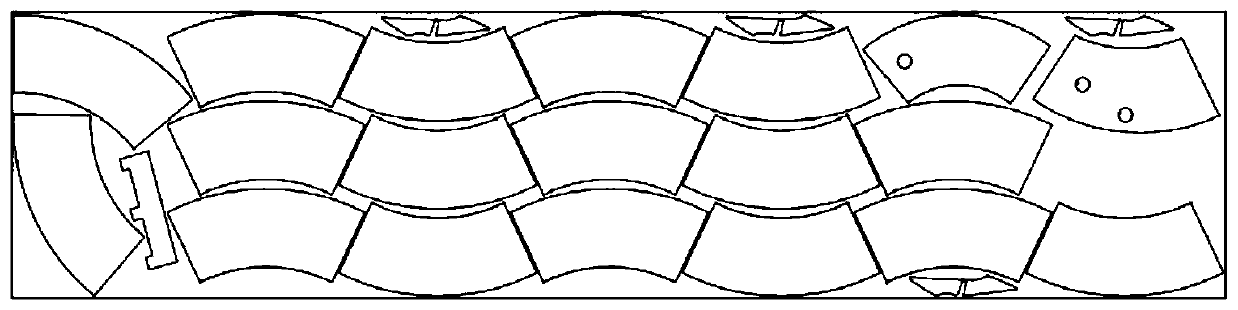
[0043] At present, in the process of using intelligent vision-guided magnetic suction tools to realize intelligent grasping operations, visual photography is used. After the photographing is completed, the processor analyzes the image information in real time to calculate the position of the workpiece and the information of the magnetic suction point. Among them, in the process of ana...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More