UWB/INS combined indoor positioning method based on particle filter algorithm
A particle filter algorithm and indoor positioning technology, applied in navigation calculation tools, navigation through speed/acceleration measurement, advanced technology, etc., can solve the problem of low positioning accuracy of the positioning system and achieve the effect of reducing the impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with accompanying drawing and specific implementation, the present invention is further described:
[0036] UWB / INS combined indoor positioning method based on particle filter algorithm, including:
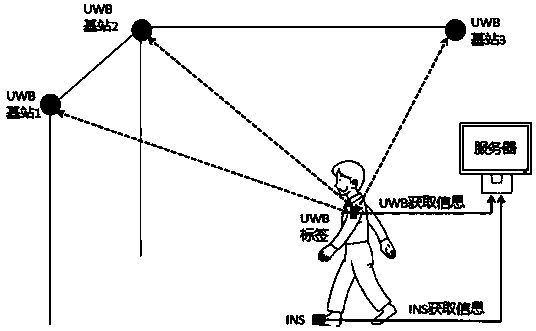
[0037] Pre-arrange the UWB base station indoors, fix the UWB tag on the person, fix the INS sensor on the toe of the person, and then carry out the following steps:
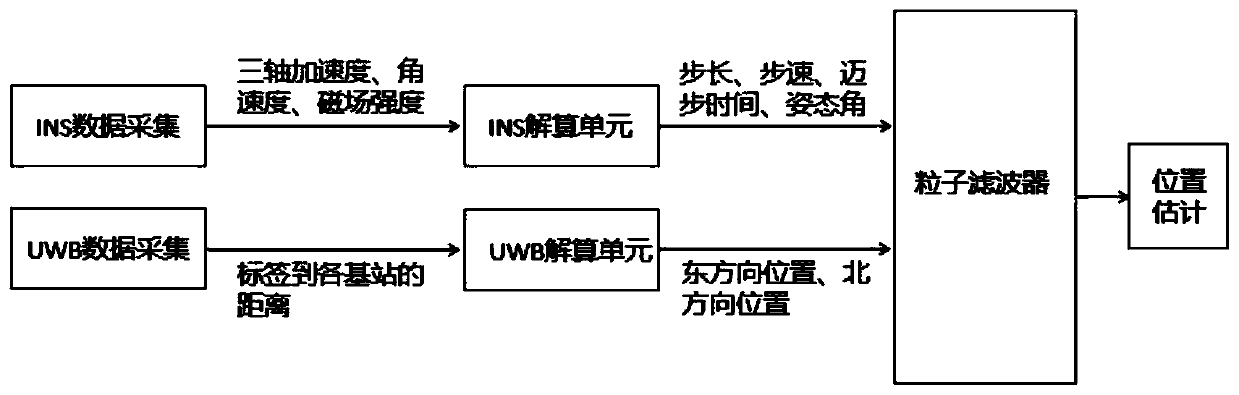
[0038] Step 1: Obtain the distance from the person to be positioned to each reference base station through the UWB system, and calculate the east and north positions of the person through the UWB position calculation unit.
[0039] Step 2: Obtain the three-axis acceleration, three-axis angular velocity, and three-axis magnetic field strength of the person during walking through the INS system, and calculate the step length, eastward pace, and northward pace of the person through the INS calculation unit , step time and attitude angle.
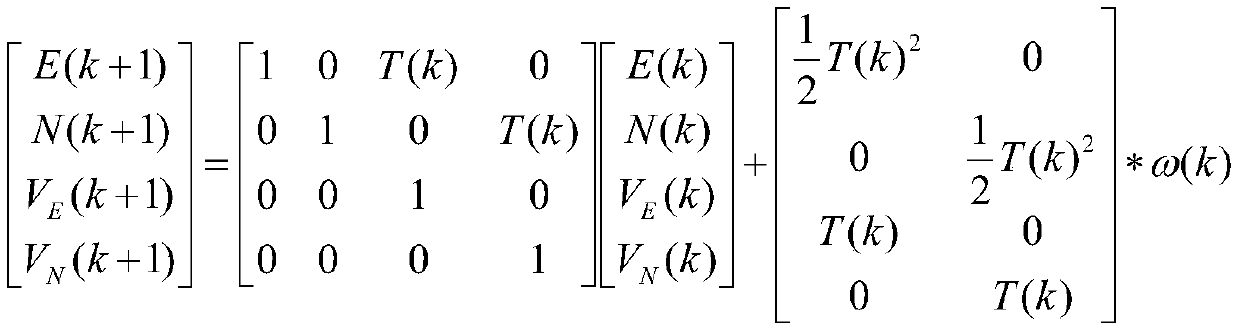
[0040] Step 3: Use the eastward position and northw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More