

Foot structure of biped robot and all-terrain pavement adaptation method thereof
A biped robot and adaptive method technology, applied in the field of robotics, can solve problems such as difficulty in maintaining balance and dumping, and achieve the effects of reducing impact, cushioning, shock absorption, and force feedback capabilities, and improving walking stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with accompanying drawing.
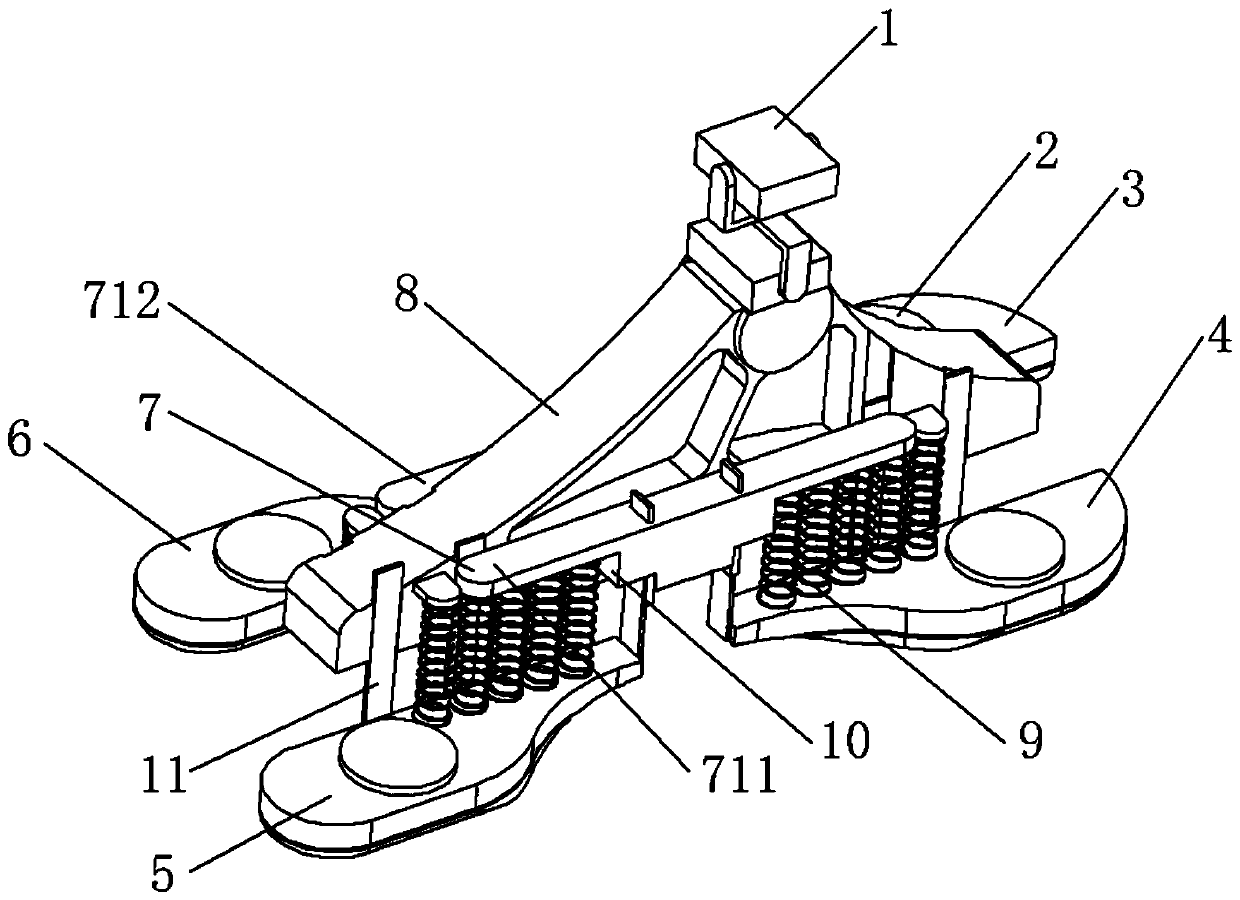
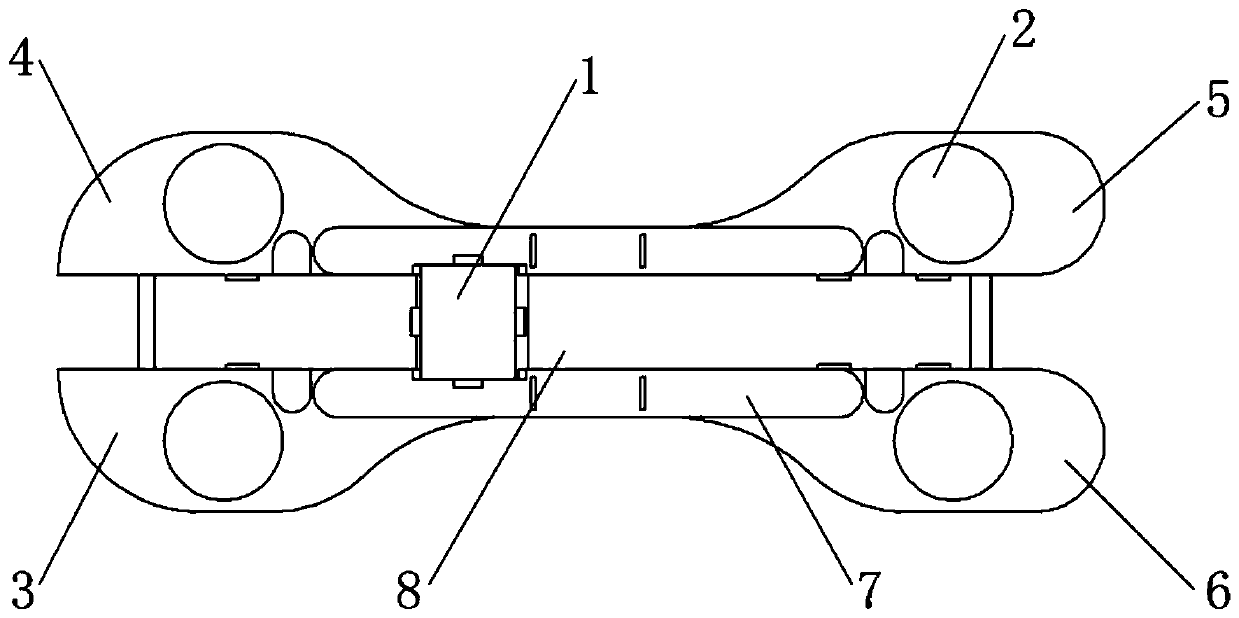
[0038] refer to Figure 1-2 , the foot structure adapted to the three-dimensional all-terrain road surface of the biped robot, including the arch of the foot, the toe fixed at the front end of the arch of the foot, the heel fixed at the rear end of the arch of the foot, and the ankle joint fixed at the top of the arch of the foot1 , the arch of foot includes the arch of foot body 8, the elastic element 9 and the connecting mechanism 7, the connecting mechanism 7 is fixed on the side of the arch of foot body 8, wherein the left connecting mechanism 711 is fixed on the left side of the arch of foot body 8 , the right connecting mechanism 712 is fixed on the right side of the arch body 8; the toe and heel respectively include two foot modules; respectively the right heel module 3, the left heel module 4, the left toe module 5, The right toe module 6; the right toe module 6 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More