

A method of interpreting the cutting position of the mechanical arm from the processing file of the cutting machine
A technology for manipulators and file processing, applied in manipulators, program-controlled manipulators, conveyor objects, etc., can solve problems such as confusion, cost of money and time, collisions, etc., and achieve high accuracy and high matching effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] A preferred embodiment of the present invention will be described in conjunction with the following.
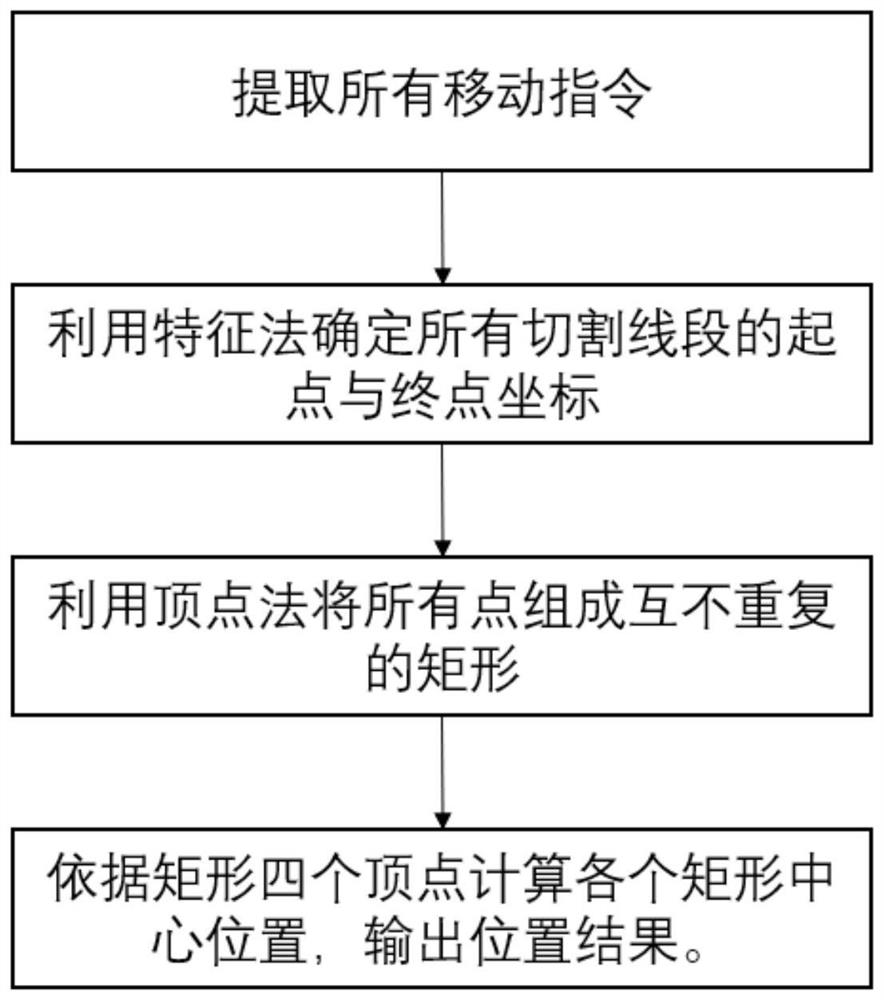
[0026] like figure 1 The method shown from the open machine processing file is interpreted by the mechanical arm sheet, which includes the following steps:
[0027] (A) Parallel to the NC file, extract all mobile instructions (the mobile instruction is G00, G01 mobile single-section instruction). When any row (ie, the current row traversed) is not identified, the G00 or G01 moves the single-section instruction, then the current row inherits the G00 or G01 mobile single-section instruction of the previous row. In the present embodiment, when the NC file is loaded into the opening machine, the NC file is traversed by the NC file; and all move instructions are extracted to deposit it in order to deposit the set L {L 0 L 1 L 2 L 3 L 4 ... l n }.
[0028] (B) Determine the end point coordinates of all cut line segments in accordance with the characteristic method, which include...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More