

Grabbing posture calculating method for scene that live-working robot grabs branch lines
A technology of live work and calculation method, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of lack of research and achieve the effect of high search accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The present invention will be further illustrated below in conjunction with the accompanying drawings and specific embodiments.
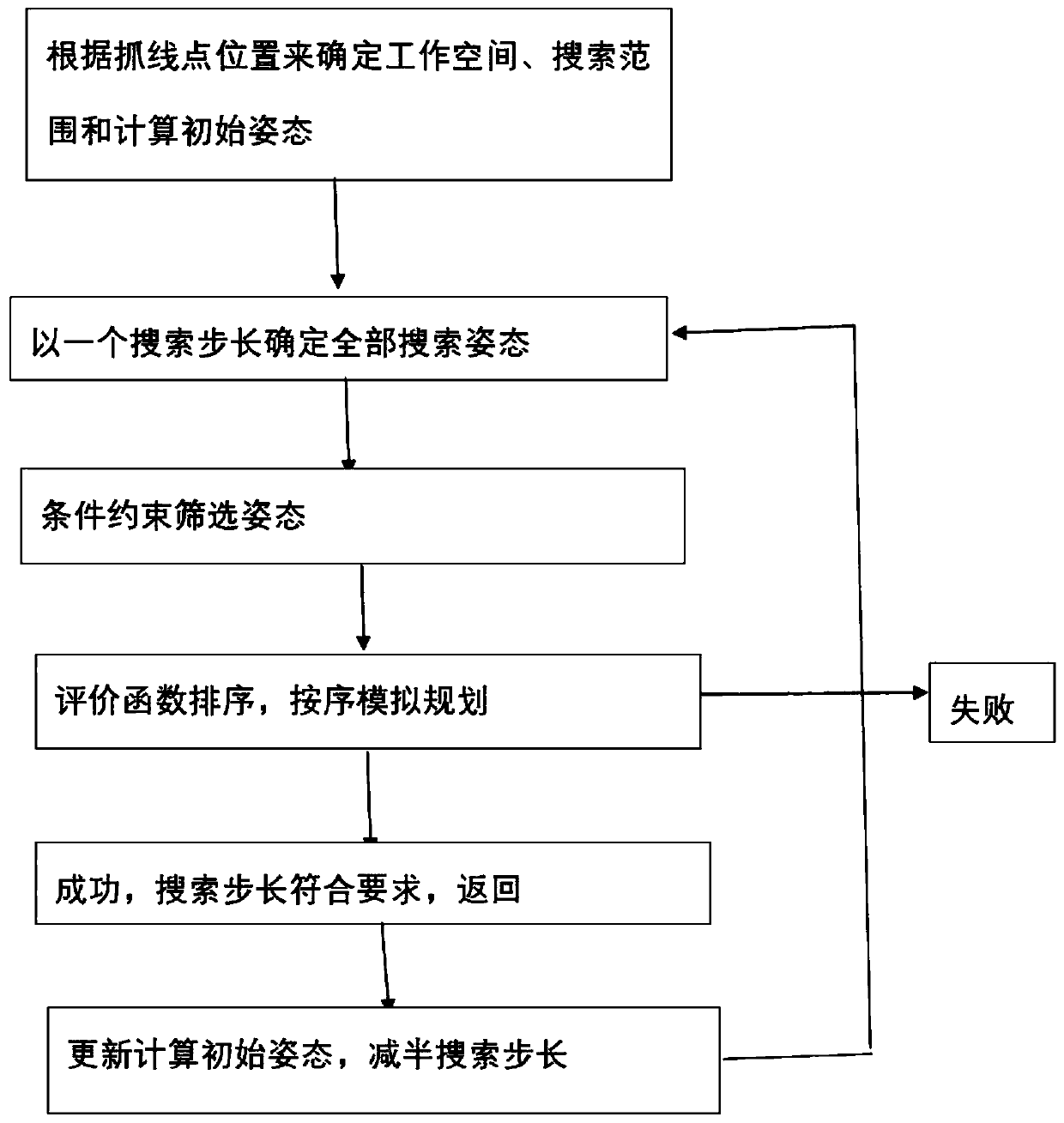
[0036] figure 1 It is a flow chart of the present invention. like figure 1 As shown, the grasping pose calculation method of the present invention for the live working robot grasping the branch line scene includes the following steps:
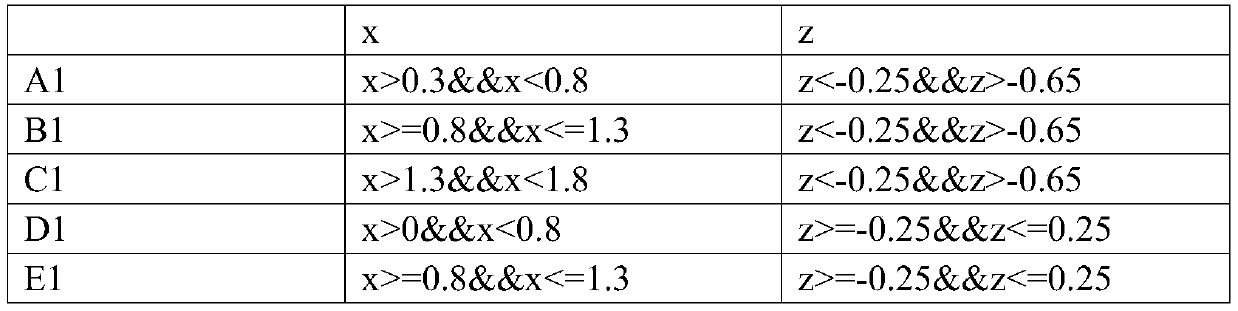
[0037] (1) Pre-divide the working space of the robotic arm according to the position of the thread grabbing point, specifically:
[0038] In this example, a coordinate system is first established at the geometric center of the robot, and the coordinates of the line grabbing point are determined according to the components of the distance between the position of the line grabbing point and the origin on the x, y, and z axes, and the unit of distance is meters; For the positive and negative values of the x-coordinate, first divide the workspace into two groups, and then divide the workspace into 9 (not li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More