

Electronic parking control module of automatic parking system of electric moped
A technology for electric bicycles and automatic parking, which is applied to the brackets of bicycles, vehicle parts, bicycle accessories, etc., can solve the problems of laborious manual parking, prevent injuries, realize overload protection functions, and improve the convenience and safety of use. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
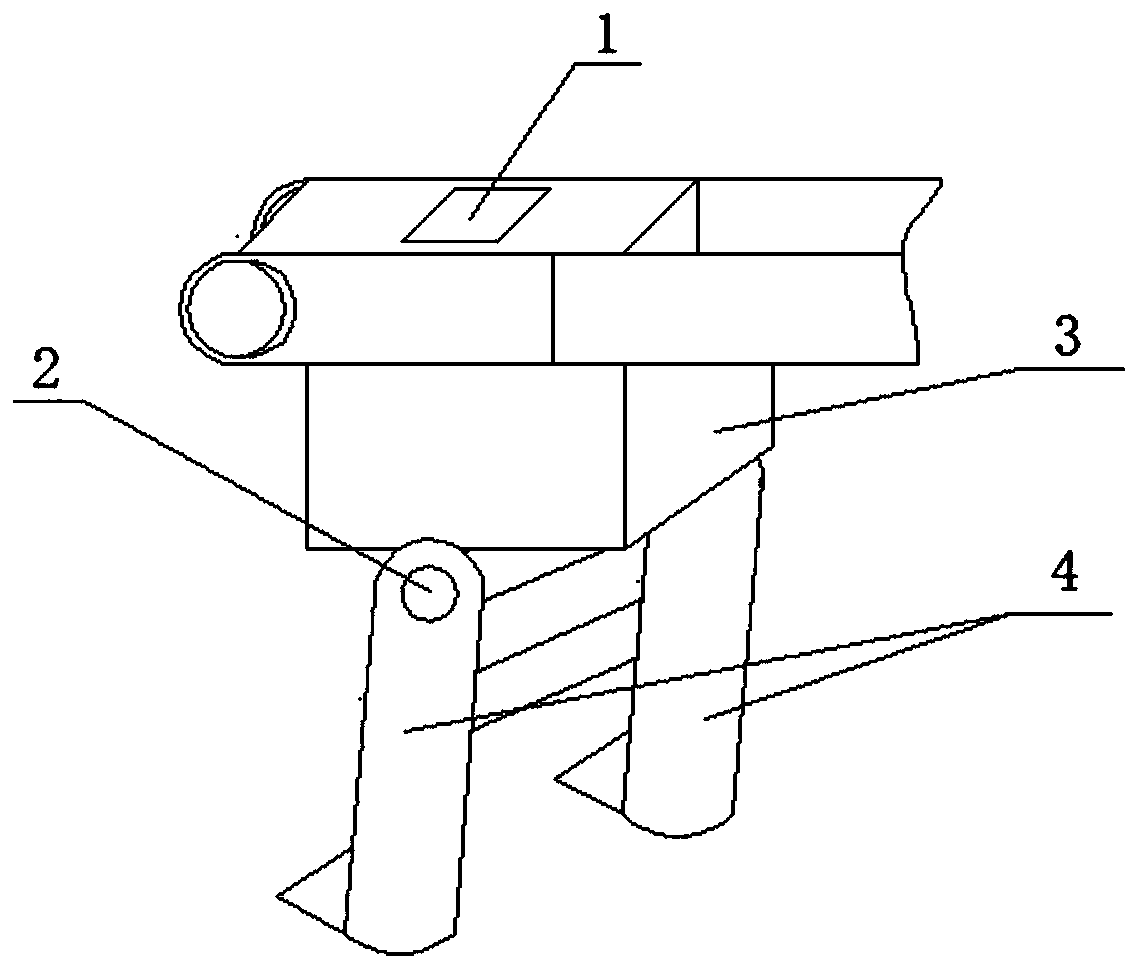
[0026] See figure 1 , an electronic parking control module of an automatic parking system for an electric moped, comprising a control circuit board 1 and a load sensor 2, the control circuit board 1 being provided with a minimum system U4 of a single chip microcomputer (see Figure 4 ), the vehicle speed detection circuit, the load detection circuit and the logic control circuit, the minimum system U4 of the single chip microcomputer drives the parking motor 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More