A detection method for subsynchronous oscillation in power system with high proportion of renewable energy
A renewable energy, sub-synchronous oscillation technology, applied in the field of power system, can solve the problems of not ideal frequency signal processing, excessive calculation amount, etc., and achieve the effects of accurate extraction, improved calculation accuracy, and good robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
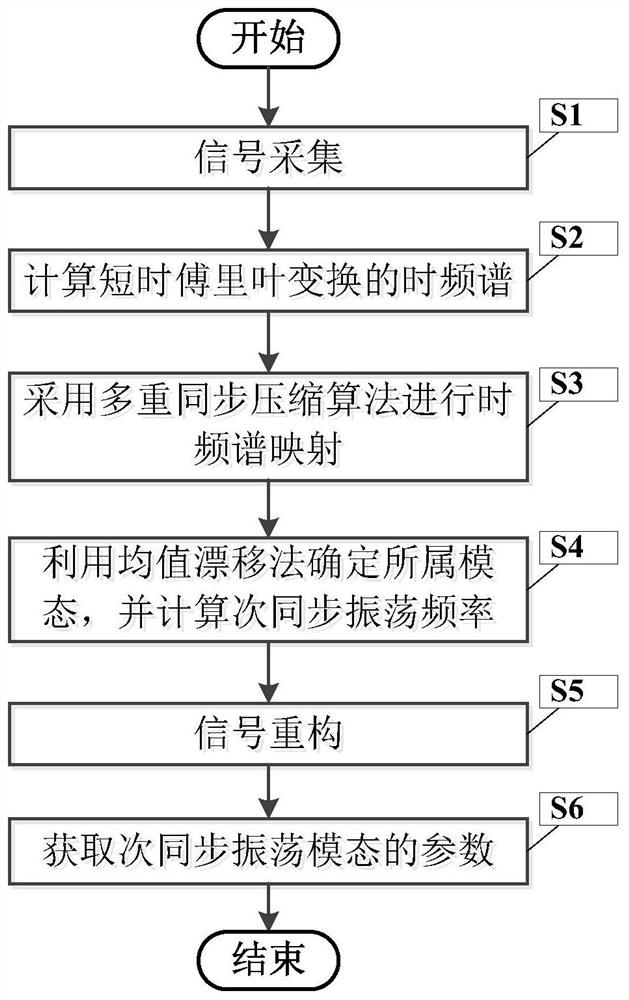
[0067] figure 1 It is a flowchart of a method for detecting subsynchronous oscillation of a high-proportion renewable energy power system according to the present invention.
[0068] In this example, if figure 1 As shown, the present invention is a method for detecting subsynchronous oscillation of a high-proportion renewable energy power system, comprising the following steps:
[0069] S1, signal acquisition;
[0070] Collect the voltage signal or current signal at the output end of the high-proportion renewable energy power system;
[0071] S2. Calculate the time spectrum of the short-time Fourier transform of the voltage signal or the current signal;
[0072] S2.1. Let the time-varying signal model of voltage signal or current signal be s(t):
[0073] s(t)=A(t)e iφ(t) (1)
[0074] Among them, A(t) represents the amplitude of the voltage signal or current signal, φ(t) represents the phase of the voltage signal or current signal, i is the imaginary number unit, and t i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



