

Water leakage detection protection method for underwater robot multi-sensor information fusion
An underwater robot and multi-sensor technology, applied in the direction of detecting the presence of fluid at the leak point, using liquid/vacuum to measure the liquid tightness, and measuring the rate of increase and deceleration of the fluid, etc., can solve the problem of internal devices and components Problems such as short-circuit damage, false alarms, waste of manpower maintenance resources, etc., to overcome the problem of insufficient accuracy, reduce the degree of damage, improve anti-interference ability and detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings.
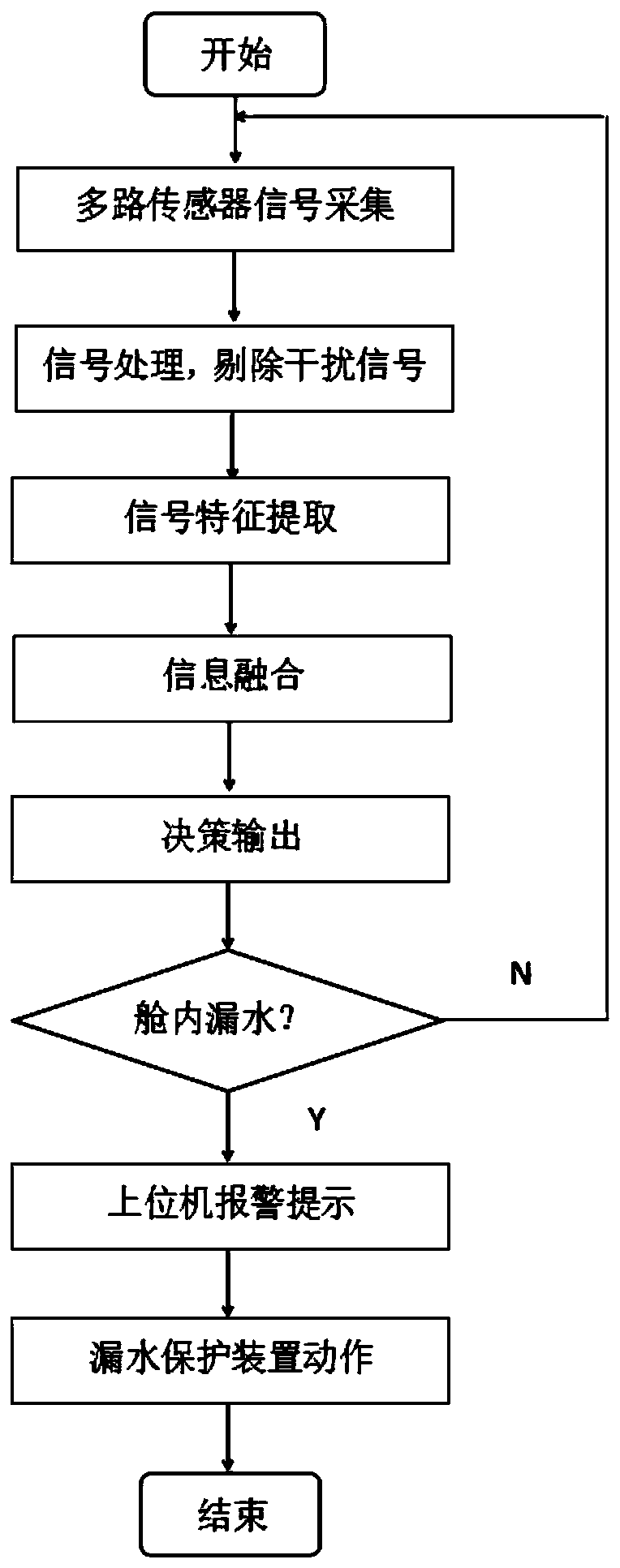
[0031] see Figure 1 to Figure 4 As shown, the present invention provides an embodiment: a water leakage detection and protection method for multi-sensor information fusion of an underwater robot, characterized in that:
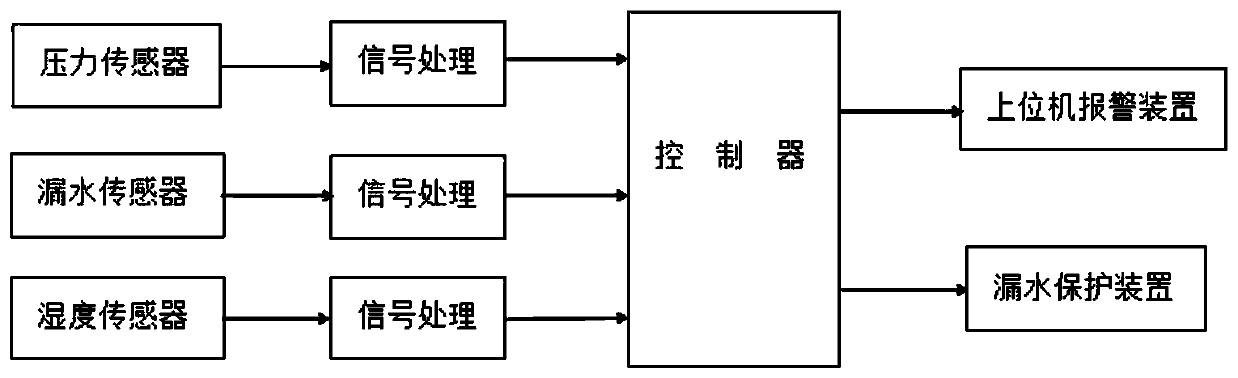
[0032] Step S1, install a plurality of water leakage sensors on the edge of the cabin door of the underwater robot cabin where water is easy to leak, and the water leakage sensors are electrically connected to the controller of the underwater robot; so that water leakage is prone to occur at the bottom of the cabin Arrange N water leakage sensors at the position (the value of N depends on the actual control system precision requirements and hardware). When water leakage occurs, the water leakage sensor outputs a high-level signal, otherwise it is a low-level signal;
[0033] Step S2, a humidity sensor for detecting humidity is installed at the head, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More