

The method of balancing the center of gravity of the gimbal, the gimbal and the client
A gimbal and trim technology, applied in the gimbal field, can solve problems affecting the use of the gimbal, unstable center of gravity of the gimbal, etc., and achieve the effects of reducing the risk of scalding the user, avoiding the decline of disturbance suppression performance, and reducing power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
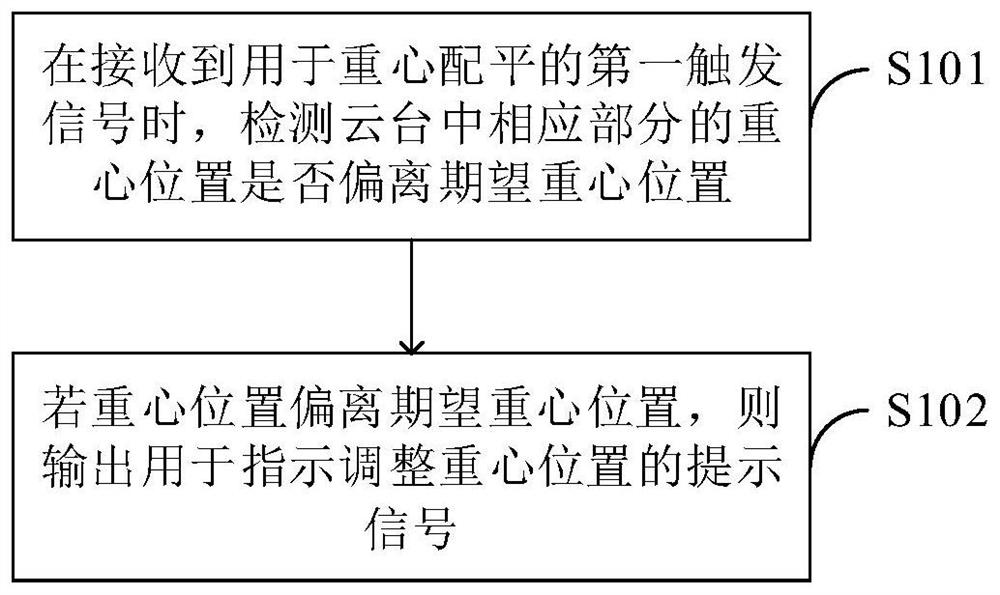
[0043] figure 1 It is a flow chart of the method for balancing the center of gravity of the gimbal in an embodiment of the present invention on the gimbal side. It should be noted that the execution subject of the method for balancing the center of gravity of the gimbal according to Embodiment 1 of the present invention is the gimbal. like figure 1 As shown, the method for balancing the center of gravity of the gimbal according to Embodiment 1 of the present invention may include the following steps:
[0044] S101: When receiving the first trigger signal for balancing the center of gravity, detect whether the position of the center of gravity of the corresponding part in the gimbal deviates from the desired position of the center of gravity;
[0045] Wherein, the first trigger signal is used to instruct the gimbal to perform center-of-gravity balance, and the gimbal in this embodiment performs center-of-gravity balance after receiving the first trigger signal. Optionally, t...
Embodiment 2
[0194] Figure 9 It is a flow chart of the method for balancing the center of gravity of the gimbal in an embodiment of the present invention on the client side. It should be noted that the execution subject of the method for balancing the center of gravity of the gimbal according to Embodiment 2 of the present invention is a client, which can communicate with the gimbal, and the client can be a mobile terminal such as a mobile phone or a Pad, or other Terminal Equipment.
[0195] Such as Figure 9 As shown, the method for balancing the center of gravity of the gimbal according to Embodiment 2 of the present invention may include the following steps:
[0196] S901: If a trim instruction is received, generate a first trigger signal for center-of-gravity trim;
[0197] In this embodiment, the method for trimming the center of gravity of the gimbal further includes: before receiving the trim command, receiving an evaluation result sent by the gimbal. Wherein, the evaluation res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More